mirror of
https://gitee.com/mirrors_PX4/PX4-Autopilot.git
synced 2026-06-05 13:00:06 +08:00
Compare commits
20 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
05a2a32150 | ||
|
|
5d63091d35 | ||
|
|
7092e1074c | ||
|
|
02891125fd | ||
|
|
d6c505ad96 | ||
|
|
88100f516d | ||
|
|
e37382edcb | ||
|
|
093abc42fb | ||
|
|
6230f72ce7 | ||
|
|
369f7e9e85 | ||
|
|
1dfb98714d | ||
|
|
2096e3ebf2 | ||
|
|
d3ac2a0869 | ||
|
|
aba7e592c3 | ||
|
|
8cd4055da9 | ||
|
|
03ab57d80c | ||
|
|
e128227293 | ||
|
|
0a77f87715 | ||
|
|
8662dd83ab | ||
|
|
99cad3ea9f |
@@ -28,7 +28,7 @@ pipeline {
|
||||
]
|
||||
|
||||
def base_builds = [
|
||||
target: ["px4_sitl_default"],
|
||||
target: ["px4_sitl_rtps"],
|
||||
image: docker_images.base,
|
||||
archive: false
|
||||
]
|
||||
@@ -58,7 +58,6 @@ pipeline {
|
||||
"holybro_can-gps-v1_default",
|
||||
"holybro_durandal-v1_default",
|
||||
"holybro_kakutef7_default",
|
||||
"holybro_kakuteh7_default",
|
||||
"holybro_pix32v5_default",
|
||||
"matek_h743-slim",
|
||||
"matek_gnss-m9n-f4_canbootloader",
|
||||
|
||||
@@ -705,21 +705,18 @@ void quickCalibrate() {
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "gyro_calibration status || true"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate accel quick; sleep 1"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate accel quick"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show CAL_ACC*"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate gyro; sleep 2"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate gyro"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show CAL_GYRO*"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate level; sleep 2"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate level"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show SENS*"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate mag quick; sleep 1"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate mag quick"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show CAL_MAG*"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "commander calibrate baro; sleep 5"'
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show CAL_BARO*"'
|
||||
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "param show CAL_*"' // parameters after
|
||||
sh './Tools/HIL/run_nsh_cmd.py --device `find /dev/serial -name *usb-*` --cmd "sensors status"'
|
||||
}
|
||||
|
||||
@@ -20,7 +20,6 @@ jobs:
|
||||
ark_can-flow,
|
||||
ark_can-gps,
|
||||
ark_can-rtk-gps,
|
||||
ark_cannode,
|
||||
atl_mantis-edu,
|
||||
av_x-v1,
|
||||
bitcraze_crazyflie,
|
||||
|
||||
@@ -29,9 +29,9 @@ jobs:
|
||||
token: ${{ secrets.ACCESS_TOKEN }}
|
||||
|
||||
- name: Download MAVSDK
|
||||
run: wget "https://github.com/mavlink/MAVSDK/releases/download/v$(cat test/mavsdk_tests/MAVSDK_VERSION)/libmavsdk-dev_$(cat test/mavsdk_tests/MAVSDK_VERSION)_ubuntu20.04_amd64.deb"
|
||||
run: wget "https://github.com/mavlink/MAVSDK/releases/download/v$(cat test/mavsdk_tests/MAVSDK_VERSION)/mavsdk_$(cat test/mavsdk_tests/MAVSDK_VERSION)_ubuntu20.04_amd64.deb"
|
||||
- name: Install MAVSDK
|
||||
run: dpkg -i "libmavsdk-dev_$(cat test/mavsdk_tests/MAVSDK_VERSION)_ubuntu20.04_amd64.deb"
|
||||
run: dpkg -i "mavsdk_$(cat test/mavsdk_tests/MAVSDK_VERSION)_ubuntu20.04_amd64.deb"
|
||||
|
||||
- name: Prepare ccache timestamp
|
||||
id: ccache_cache_timestamp
|
||||
|
||||
+4
-7
@@ -24,12 +24,12 @@
|
||||
branch = master
|
||||
[submodule "platforms/nuttx/NuttX/nuttx"]
|
||||
path = platforms/nuttx/NuttX/nuttx
|
||||
url = https://github.com/PX4/NuttX.git
|
||||
branch = px4_firmware_nuttx-10.1.0+
|
||||
url = https://github.com/JacobCrabill/incubator-nuttx.git
|
||||
branch = dev/stm32h7-socketcan
|
||||
[submodule "platforms/nuttx/NuttX/apps"]
|
||||
path = platforms/nuttx/NuttX/apps
|
||||
url = https://github.com/PX4/NuttX-apps.git
|
||||
branch = px4_firmware_nuttx-10.1.0+
|
||||
url = git@github.com:JacobCrabill/incubator-nuttx-apps.git
|
||||
branch = dev/nuttx-10.2.0
|
||||
[submodule "Tools/flightgear_bridge"]
|
||||
path = Tools/flightgear_bridge
|
||||
url = https://github.com/PX4/PX4-FlightGear-Bridge.git
|
||||
@@ -64,6 +64,3 @@
|
||||
path = src/lib/crypto/libtommath
|
||||
url = https://github.com/PX4/libtommath.git
|
||||
branch = px4
|
||||
[submodule "src/modules/microdds_client/Micro-XRCE-DDS-Client"]
|
||||
path = src/modules/microdds_client/Micro-XRCE-DDS-Client
|
||||
url = https://github.com/eProsima/Micro-XRCE-DDS-Client.git
|
||||
|
||||
Vendored
-10
@@ -121,16 +121,6 @@ CONFIG:
|
||||
buildType: MinSizeRel
|
||||
settings:
|
||||
CONFIG: ark_can-rtk-gps_canbootloader
|
||||
ark_cannode_default:
|
||||
short: ark_cannode_default
|
||||
buildType: MinSizeRel
|
||||
settings:
|
||||
CONFIG: ark_cannode_default
|
||||
ark_cannode_canbootloader:
|
||||
short: ark_cannode_canbootloader
|
||||
buildType: MinSizeRel
|
||||
settings:
|
||||
CONFIG: ark_cannode_canbootloader
|
||||
atl_mantis-edu_default:
|
||||
short: atl_mantis-edu
|
||||
buildType: MinSizeRel
|
||||
|
||||
@@ -10,7 +10,6 @@
|
||||
# enable fusion of landing target velocity
|
||||
param set-default LTEST_MODE 1
|
||||
param set-default PLD_HACC_RAD 0.1
|
||||
param set-default RTL_PLD_MD 2
|
||||
|
||||
# Start up Landing Target Estimator module
|
||||
landing_target_estimator start
|
||||
|
||||
@@ -71,6 +71,7 @@ param set-default MPC_XY_VEL_I_ACC 4
|
||||
param set-default MPC_XY_VEL_D_ACC 0.1
|
||||
|
||||
param set-default NAV_ACC_RAD 5
|
||||
param set-default NAV_LOITER_RAD 80
|
||||
|
||||
param set-default VT_FWD_THRUST_EN 4
|
||||
param set-default VT_F_TRANS_THR 0.75
|
||||
|
||||
@@ -70,6 +70,7 @@ param set-default MPC_XY_VEL_I_ACC 4
|
||||
param set-default MPC_XY_VEL_D_ACC 0.1
|
||||
|
||||
param set-default NAV_ACC_RAD 5
|
||||
param set-default NAV_LOITER_RAD 80
|
||||
|
||||
param set-default VT_FW_DIFTHR_EN 1
|
||||
param set-default VT_FW_DIFTHR_SC 0.5
|
||||
|
||||
@@ -82,6 +82,7 @@ param set-default MPC_XY_VEL_I_ACC 4
|
||||
param set-default MPC_XY_VEL_D_ACC 0.1
|
||||
|
||||
param set-default NAV_ACC_RAD 5
|
||||
param set-default NAV_LOITER_RAD 80
|
||||
|
||||
param set-default VT_B_TRANS_DUR 8
|
||||
param set-default VT_FWD_THRUST_EN 4
|
||||
|
||||
@@ -38,6 +38,7 @@ param set-default MPC_XY_VEL_I_ACC 4
|
||||
param set-default MPC_XY_VEL_D_ACC 0.1
|
||||
|
||||
param set-default NAV_ACC_RAD 5
|
||||
param set-default NAV_LOITER_RAD 80
|
||||
|
||||
param set-default VT_FWD_THRUST_EN 4
|
||||
param set-default VT_F_TRANS_THR 0.75
|
||||
|
||||
@@ -223,13 +223,6 @@ rc_update start
|
||||
manual_control start
|
||||
sensors start
|
||||
commander start
|
||||
|
||||
# Configure vehicle type specific parameters.
|
||||
# Note: rc.vehicle_setup is the entry point for rc.interface,
|
||||
# rc.fw_apps, rc.mc_apps, rc.rover_apps, and rc.vtol_apps.
|
||||
#
|
||||
. ${R}etc/init.d/rc.vehicle_setup
|
||||
|
||||
navigator start
|
||||
|
||||
# Try to start the micrortps_client with UDP transport if module exists
|
||||
@@ -259,6 +252,12 @@ then
|
||||
gyro_calibration start
|
||||
fi
|
||||
|
||||
# Configure vehicle type specific parameters.
|
||||
# Note: rc.vehicle_setup is the entry point for rc.interface,
|
||||
# rc.fw_apps, rc.mc_apps, rc.rover_apps, and rc.vtol_apps.
|
||||
#
|
||||
. ${R}etc/init.d/rc.vehicle_setup
|
||||
|
||||
#user defined mavlink streams for instances can be in PATH
|
||||
. px4-rc.mavlink
|
||||
|
||||
|
||||
@@ -49,6 +49,7 @@ param set-default MPC_Z_VEL_MAX_DN 1.5
|
||||
|
||||
param set-default NAV_ACC_RAD 5
|
||||
param set-default NAV_DLL_ACT 2
|
||||
param set-default NAV_LOITER_RAD 80
|
||||
|
||||
param set-default RTL_DESCEND_ALT 10
|
||||
param set-default RTL_RETURN_ALT 30
|
||||
|
||||
@@ -16,6 +16,8 @@ param set-default MAV_TYPE 1
|
||||
param set-default COM_POS_FS_DELAY 5
|
||||
param set-default COM_POS_FS_EPH 15
|
||||
param set-default COM_POS_FS_EPV 30
|
||||
param set-default COM_POS_FS_GAIN 0
|
||||
param set-default COM_POS_FS_PROB 1
|
||||
param set-default COM_VEL_FS_EVH 5
|
||||
# Disable preflight disarm to not interfere with external launching
|
||||
param set-default COM_DISARM_PRFLT -1
|
||||
|
||||
@@ -83,28 +83,16 @@ then
|
||||
teraranger start -X
|
||||
fi
|
||||
|
||||
# paa3905 optical flow sensor (external SPI)
|
||||
if param greater -s SENS_EN_PAA3905 0
|
||||
then
|
||||
paa3905 -S start
|
||||
fi
|
||||
|
||||
# paw3902 optical flow sensor (external SPI)
|
||||
if param greater -s SENS_EN_PAW3902 0
|
||||
then
|
||||
paw3902 -S start
|
||||
fi
|
||||
|
||||
# pmw3901 optical flow sensor (external SPI)
|
||||
# Possible external pmw3901 optical flow sensor
|
||||
if param greater -s SENS_EN_PMW3901 0
|
||||
then
|
||||
pmw3901 -S start
|
||||
fi
|
||||
|
||||
# Check for px4flow sensor
|
||||
if param compare -s SENS_EN_PX4FLOW 1
|
||||
# Possible external paw3902 optical flow sensor
|
||||
if param greater -s SENS_EN_PAW3902 0
|
||||
then
|
||||
px4flow start -X
|
||||
paw3902 -S start
|
||||
fi
|
||||
|
||||
# vl53l1x i2c distance sensor
|
||||
|
||||
@@ -7,7 +7,7 @@
|
||||
|
||||
set VEHICLE_TYPE vtol
|
||||
|
||||
# MAV_TYPE_VTOL_FIXEDROTOR 22
|
||||
# MAV_TYPE_VTOL_RESERVED2 22
|
||||
param set-default MAV_TYPE 22
|
||||
|
||||
param set-default MIS_TAKEOFF_ALT 20
|
||||
|
||||
@@ -408,13 +408,6 @@ else
|
||||
commander start
|
||||
fi
|
||||
|
||||
#
|
||||
# Configure vehicle type specific parameters.
|
||||
# Note: rc.vehicle_setup is the entry point for rc.interface,
|
||||
# rc.fw_apps, rc.mc_apps, rc.rover_apps, and rc.vtol_apps.
|
||||
#
|
||||
. ${R}etc/init.d/rc.vehicle_setup
|
||||
|
||||
# Pre-takeoff continuous magnetometer calibration
|
||||
if param compare -s MBE_ENABLE 1
|
||||
then
|
||||
@@ -465,6 +458,13 @@ else
|
||||
fi
|
||||
fi
|
||||
|
||||
#
|
||||
# Configure vehicle type specific parameters.
|
||||
# Note: rc.vehicle_setup is the entry point for rc.interface,
|
||||
# rc.fw_apps, rc.mc_apps, rc.rover_apps, and rc.vtol_apps.
|
||||
#
|
||||
. ${R}etc/init.d/rc.vehicle_setup
|
||||
|
||||
#
|
||||
# Play the startup tune (if not disabled or there is an error)
|
||||
#
|
||||
@@ -492,6 +492,12 @@ else
|
||||
gimbal start
|
||||
fi
|
||||
|
||||
# Check for flow sensor
|
||||
if param compare -s SENS_EN_PX4FLOW 1
|
||||
then
|
||||
px4flow start -X
|
||||
fi
|
||||
|
||||
# Blacksheep telemetry
|
||||
if param compare -s TEL_BST_EN 1
|
||||
then
|
||||
|
||||
@@ -27,5 +27,4 @@ exec find boards msg src platforms test \
|
||||
-path src/lib/crypto/monocypher -prune -o \
|
||||
-path src/lib/crypto/libtomcrypt -prune -o \
|
||||
-path src/lib/crypto/libtommath -prune -o \
|
||||
-path src/modules/microdds_client/Micro-XRCE-DDS-Client -prune -o \
|
||||
-type f \( -name "*.c" -o -name "*.h" -o -name "*.cpp" -o -name "*.hpp" \) | grep $PATTERN
|
||||
|
||||
@@ -55,7 +55,7 @@ def perform_imu_checks(
|
||||
|
||||
# perform the vibration check
|
||||
imu_status['imu_vibration_check'] = 'Pass'
|
||||
for imu_vibr_metric in ['imu_coning', 'imu_hfgyro', 'imu_hfaccel']:
|
||||
for imu_vibr_metric in ['imu_coning', 'imu_hfdang', 'imu_hfdvel']:
|
||||
mean_metric = '{:s}_mean'.format(imu_vibr_metric)
|
||||
peak_metric = '{:s}_peak'.format(imu_vibr_metric)
|
||||
if imu_metrics[mean_metric] > check_levels['{:s}_warn'.format(mean_metric)] \
|
||||
|
||||
@@ -144,27 +144,17 @@ def calculate_imu_metrics(ulog: ULog, multi_instance, in_air_no_ground_effects:
|
||||
imu_metrics[result] = calculate_stat_from_signal(
|
||||
estimator_status_data, 'estimator_status', signal, in_air_no_ground_effects, np.median)
|
||||
|
||||
|
||||
# calculates peak and mean for IMU vibration checks
|
||||
for imu_status_instance in range(4):
|
||||
try:
|
||||
vehicle_imu_status_data = ulog.get_dataset('vehicle_imu_status', imu_status_instance).data
|
||||
|
||||
if vehicle_imu_status_data['accel_device_id'][0] == estimator_status_data['accel_device_id'][0]:
|
||||
|
||||
for signal, result in [('delta_angle_coning_metric', 'imu_coning'),
|
||||
('gyro_vibration_metric', 'imu_hfgyro'),
|
||||
('accel_vibration_metric', 'imu_hfaccel')]:
|
||||
|
||||
peak = calculate_stat_from_signal(vehicle_imu_status_data, 'vehicle_imu_status', signal, in_air_no_ground_effects, np.amax)
|
||||
|
||||
if peak > 0.0:
|
||||
imu_metrics['{:s}_peak'.format(result)] = peak
|
||||
imu_metrics['{:s}_mean'.format(result)] = calculate_stat_from_signal(vehicle_imu_status_data, 'vehicle_imu_status', signal, in_air_no_ground_effects, np.mean)
|
||||
|
||||
except:
|
||||
pass
|
||||
|
||||
for signal, result in [('vibe[0]', 'imu_coning'),
|
||||
('vibe[1]', 'imu_hfdang'),
|
||||
('vibe[2]', 'imu_hfdvel')]:
|
||||
peak = calculate_stat_from_signal(
|
||||
estimator_status_data, 'estimator_status', signal, in_air_no_ground_effects, np.amax)
|
||||
if peak > 0.0:
|
||||
imu_metrics['{:s}_peak'.format(result)] = peak
|
||||
imu_metrics['{:s}_mean'.format(result)] = calculate_stat_from_signal(
|
||||
estimator_status_data, 'estimator_status', signal,
|
||||
in_air_no_ground_effects, np.mean)
|
||||
|
||||
# IMU bias checks
|
||||
estimator_states_data = ulog.get_dataset('estimator_states', multi_instance).data
|
||||
|
||||
@@ -48,7 +48,7 @@ for filename in os.listdir(metadata_directory):
|
||||
|
||||
# # print out the check levels
|
||||
# print('\n'+'The following metadata loaded from '+filename+' were used'+'\n')
|
||||
# val = population_data.get(filename, {}).get('imu_hfgyro_mean')
|
||||
# val = population_data.get(filename, {}).get('imu_hfdang_mean')
|
||||
# print(val)
|
||||
|
||||
# Open pdf file for plotting
|
||||
@@ -90,10 +90,10 @@ population_results = {
|
||||
'ofy_fail_pct_avg':[float('NaN'),'The mean percentage of innovation test fails for the Y axis optical flow sensor'],
|
||||
'imu_coning_max_avg':[float('NaN'),'The mean of the maximum in-flight values of the IMU delta angle coning vibration level (mrad)'],
|
||||
'imu_coning_mean_avg':[float('NaN'),'The mean of the mean in-flight value of the IMU delta angle coning vibration level (mrad)'],
|
||||
'imu_hfgyro_max_avg':[float('NaN'),'The mean of the maximum in-flight values of the IMU high frequency gyro vibration level (rad/s)'],
|
||||
'imu_hfgyro_mean_avg':[float('NaN'),'The mean of the mean in-flight value of the IMU delta high frequency gyro vibration level (rad/s)'],
|
||||
'imu_hfaccel_max_avg':[float('NaN'),'The mean of the maximum in-flight values of the IMU high frequency accel vibration level (m/s/s)'],
|
||||
'imu_hfaccel_mean_avg':[float('NaN'),'The mean of the mean in-flight value of the IMU delta high frequency accel vibration level (m/s/s)'],
|
||||
'imu_hfdang_max_avg':[float('NaN'),'The mean of the maximum in-flight values of the IMU high frequency delta angle vibration level (mrad)'],
|
||||
'imu_hfdang_mean_avg':[float('NaN'),'The mean of the mean in-flight value of the IMU delta high frequency delta angle vibration level (mrad)'],
|
||||
'imu_hfdvel_max_avg':[float('NaN'),'The mean of the maximum in-flight values of the IMU high frequency delta velocity vibration level (m/s)'],
|
||||
'imu_hfdvel_mean_avg':[float('NaN'),'The mean of the mean in-flight value of the IMU delta high frequency delta velocity vibration level (m/s)'],
|
||||
'obs_ang_median_avg':[float('NaN'),'The mean of the median in-flight value of the output observer angular tracking error magnitude (mrad)'],
|
||||
'obs_vel_median_avg':[float('NaN'),'The mean of the median in-flight value of the output observer velocity tracking error magnitude (m/s)'],
|
||||
'obs_pos_median_avg':[float('NaN'),'The mean of the median in-flight value of the output observer position tracking error magnitude (m)'],
|
||||
@@ -360,54 +360,54 @@ if (len(result1) > 0 and len(result2) > 0):
|
||||
plt.close(8)
|
||||
|
||||
# IMU high frequency delta angle vibration levels
|
||||
temp = np.asarray([population_data[k].get('imu_hfgyro_peak') for k in found_keys])
|
||||
temp = np.asarray([population_data[k].get('imu_hfdang_peak') for k in found_keys])
|
||||
result1 = 1000.0 * temp[np.isfinite(temp)]
|
||||
temp = np.asarray([population_data[k].get('imu_hfgyro_mean') for k in found_keys])
|
||||
temp = np.asarray([population_data[k].get('imu_hfdang_mean') for k in found_keys])
|
||||
result2 = 1000.0 * temp[np.isfinite(temp)]
|
||||
|
||||
if (len(result1) > 0 and len(result2) > 0):
|
||||
population_results['imu_hfgyro_max_avg'][0] = np.mean(result1)
|
||||
population_results['imu_hfgyro_mean_avg'][0] = np.mean(result2)
|
||||
population_results['imu_hfdang_max_avg'][0] = np.mean(result1)
|
||||
population_results['imu_hfdang_mean_avg'][0] = np.mean(result2)
|
||||
|
||||
plt.figure(9,figsize=(20,13))
|
||||
|
||||
plt.subplot(2,1,1)
|
||||
plt.hist(result1)
|
||||
plt.title("Gaussian Histogram - IMU HF Gyroscope Vibration Peak")
|
||||
plt.xlabel("imu_hfgyro_max (rad/s)")
|
||||
plt.title("Gaussian Histogram - IMU HF Delta Angle Vibration Peak")
|
||||
plt.xlabel("imu_hfdang_max (mrad)")
|
||||
plt.ylabel("Frequency")
|
||||
|
||||
plt.subplot(2,1,2)
|
||||
plt.hist(result2)
|
||||
plt.title("Gaussian Histogram - IMU HF Gyroscope Vibration Mean")
|
||||
plt.xlabel("imu_hfgyro_mean (rad/s)")
|
||||
plt.title("Gaussian Histogram - IMU HF Delta Angle Vibration Mean")
|
||||
plt.xlabel("imu_hfdang_mean (mrad)")
|
||||
plt.ylabel("Frequency")
|
||||
|
||||
pp.savefig()
|
||||
plt.close(9)
|
||||
|
||||
# IMU high frequency accel vibration levels
|
||||
temp = np.asarray([population_data[k].get('imu_hfaccel_peak') for k in found_keys])
|
||||
# IMU high frequency delta velocity vibration levels
|
||||
temp = np.asarray([population_data[k].get('imu_hfdvel_peak') for k in found_keys])
|
||||
result1 = temp[np.isfinite(temp)]
|
||||
temp = np.asarray([population_data[k].get('imu_hfaccel_mean') for k in found_keys])
|
||||
temp = np.asarray([population_data[k].get('imu_hfdvel_mean') for k in found_keys])
|
||||
result2 = temp[np.isfinite(temp)]
|
||||
|
||||
if (len(result1) > 0 and len(result2) > 0):
|
||||
population_results['imu_hfaccel_max_avg'][0] = np.mean(result1)
|
||||
population_results['imu_hfaccel_mean_avg'][0] = np.mean(result2)
|
||||
population_results['imu_hfdvel_max_avg'][0] = np.mean(result1)
|
||||
population_results['imu_hfdvel_mean_avg'][0] = np.mean(result2)
|
||||
|
||||
plt.figure(10,figsize=(20,13))
|
||||
|
||||
plt.subplot(2,1,1)
|
||||
plt.hist(result1)
|
||||
plt.title("Gaussian Histogram - IMU HF Accelerometer Vibration Peak")
|
||||
plt.xlabel("imu_hfaccel_max (m/s/s)")
|
||||
plt.title("Gaussian Histogram - IMU HF Delta Velocity Vibration Peak")
|
||||
plt.xlabel("imu_hfdvel_max (m/s)")
|
||||
plt.ylabel("Frequency")
|
||||
|
||||
plt.subplot(2,1,2)
|
||||
plt.hist(result2)
|
||||
plt.title("Gaussian Histogram - IMU HF Accelerometer Vibration Mean")
|
||||
plt.xlabel("imu_hfaccel_mean (m/s/s)")
|
||||
plt.title("Gaussian Histogram - IMU HF Delta Velocity Vibration Mean")
|
||||
plt.xlabel("imu_hfdvel_mean (m/s)")
|
||||
plt.ylabel("Frequency")
|
||||
|
||||
pp.savefig()
|
||||
@@ -535,12 +535,12 @@ single_log_results = {
|
||||
'hgt_sensor_status':['Pass','Height sensor check summary. This sensor data can be sourced from either Baro, GPS, range fidner or external vision system. A Fail result indicates a significant error that caused a significant reduction in vehicle navigation performance was detected. A Warning result indicates that error levels higher than normal were detected but these errors did not significantly impact navigation performance. A Pass result indicates that no amonalies were detected and no further investigation is required'],
|
||||
'hgt_test_max':[float('NaN'),'The maximum in-flight value of the height sensor innovation consistency test ratio.'],
|
||||
'hgt_test_mean':[float('NaN'),'The mean in-flight value of the height sensor innovation consistency test ratio.'],
|
||||
'imu_coning_mean':[float('NaN'),'Mean in-flight value of the IMU delta angle coning vibration metric (rad^2)'],
|
||||
'imu_coning_peak':[float('NaN'),'Peak in-flight value of the IMU delta angle coning vibration metric (rad^2)'],
|
||||
'imu_hfgyro_mean':[float('NaN'),'Mean in-flight value of the IMU gyro high frequency vibration metric (rad/s)'],
|
||||
'imu_hfgyro_peak':[float('NaN'),'Peak in-flight value of the IMU gyro high frequency vibration metric (rad/s)'],
|
||||
'imu_hfaccel_mean':[float('NaN'),'Mean in-flight value of the IMU accel high frequency vibration metric (m/s/s)'],
|
||||
'imu_hfaccel_peak':[float('NaN'),'Peak in-flight value of the IMU accel high frequency vibration metric (m/s/s)'],
|
||||
'imu_coning_mean':[float('NaN'),'Mean in-flight value of the IMU delta angle coning vibration metric (rad)'],
|
||||
'imu_coning_peak':[float('NaN'),'Peak in-flight value of the IMU delta angle coning vibration metric (rad)'],
|
||||
'imu_hfdang_mean':[float('NaN'),'Mean in-flight value of the IMU delta angle high frequency vibration metric (rad)'],
|
||||
'imu_hfdang_peak':[float('NaN'),'Peak in-flight value of the IMU delta angle high frequency vibration metric (rad)'],
|
||||
'imu_hfdvel_mean':[float('NaN'),'Mean in-flight value of the IMU delta velocity high frequency vibration metric (m/s)'],
|
||||
'imu_hfdvel_peak':[float('NaN'),'Peak in-flight value of the IMU delta velocity high frequency vibration metric (m/s)'],
|
||||
'imu_sensor_status':['Pass','IMU sensor check summary. A Fail result indicates a significant error that caused a significant reduction in vehicle navigation performance was detected. A Warning result indicates that error levels higher than normal were detected but these errors did not significantly impact navigation performance. A Pass result indicates that no amonalies were detected and no further investigation is required'],
|
||||
'in_air_transition_time':[float('NaN'),'The time in seconds measured from startup that the EKF transtioned into in-air mode. Set to a nan if a transition event is not detected.'],
|
||||
'mag_percentage_amber':[float('NaN'),'The percentage of in-flight consolidated magnetic field sensor innovation consistency test values > 0.5.'],
|
||||
|
||||
@@ -21,10 +21,10 @@ hagl_amber_warn_pct,5.0
|
||||
tas_amber_warn_pct,5.0
|
||||
imu_coning_peak_warn,1.8E-5
|
||||
imu_coning_mean_warn,3.6E-6
|
||||
imu_hfgyro_peak_warn,12
|
||||
imu_hfgyro_mean_warn,2.4
|
||||
imu_hfaccel_peak_warn,360
|
||||
imu_hfaccel_mean_warn,72
|
||||
imu_hfdang_peak_warn,3.0E-3
|
||||
imu_hfdang_mean_warn,6.0E-4
|
||||
imu_hfdvel_peak_warn,9.0E-2
|
||||
imu_hfdvel_mean_warn,1.8E-2
|
||||
obs_ang_err_median_warn,8.0E-3
|
||||
obs_vel_err_median_warn,0.05
|
||||
obs_pos_err_median_warn,0.15
|
||||
|
||||
|
@@ -49,12 +49,12 @@ hagl_test_mean, The mean in-flight value of the height above ground sensor innov
|
||||
ofx_fail_percentage, The percentage of in-flight recorded failure events for the optical flow sensor X-axis innovation consistency test.
|
||||
ofy_fail_percentage, The percentage of in-flight recorded failure events for the optical flow sensor Y-axis innovation consistency test.
|
||||
filter_faults_max, Largest recorded value of the filter internal fault bitmask. Should always be zero.
|
||||
imu_coning_peak, Peak in-flight value of the IMU delta angle coning vibration metric (rad^2)
|
||||
imu_coning_mean, Mean in-flight value of the IMU delta angle coning vibration metric (rad^2)
|
||||
imu_hfgyro_peak, Peak in-flight value of the IMU accel high frequency vibration metric (rad/s)
|
||||
imu_hfgyro_mean, Mean in-flight value of the IMU accel high frequency vibration metric (rad/s)
|
||||
imu_hfaccel_peak, Peak in-flight value of the IMU accel high frequency vibration metric (m/s/s)
|
||||
imu_hfaccel_mean, Mean in-flight value of the IMU accel high frequency vibration metric (m/s/s)
|
||||
imu_coning_peak, Peak in-flight value of the IMU delta angle coning vibration metric (rad)
|
||||
imu_coning_mean, Mean in-flight value of the IMU delta angle coning vibration metric (rad)
|
||||
imu_hfdang_peak, Peak in-flight value of the IMU delta angle high frequency vibration metric (rad)
|
||||
imu_hfdang_mean, Mean in-flight value of the IMU delta angle high frequency vibration metric (rad)
|
||||
imu_hfdvel_peak, Peak in-flight value of the IMU delta velocity high frequency vibration metric (m/s)
|
||||
imu_hfdvel_mean, Mean in-flight value of the IMU delta velocity high frequency vibration metric (m/s)
|
||||
output_obs_ang_err_median, Median in-flight value of the output observer angular error (rad)
|
||||
output_obs_vel_err_median, Median in-flight value of the output observer velocity error (m/s)
|
||||
output_obs_pos_err_median, Median in-flight value of the output observer position error (m)
|
||||
|
||||
|
@@ -1,55 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
# -*- coding: utf-8 -*-
|
||||
"""
|
||||
Copyright (c) 2022 PX4 Development Team
|
||||
Redistribution and use in source and binary forms, with or without
|
||||
modification, are permitted provided that the following conditions
|
||||
are met:
|
||||
|
||||
1. Redistributions of source code must retain the above copyright
|
||||
notice, this list of conditions and the following disclaimer.
|
||||
2. Redistributions in binary form must reproduce the above copyright
|
||||
notice, this list of conditions and the following disclaimer in
|
||||
the documentation and/or other materials provided with the
|
||||
distribution.
|
||||
3. Neither the name PX4 nor the names of its contributors may be
|
||||
used to endorse or promote products derived from this software
|
||||
without specific prior written permission.
|
||||
|
||||
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
POSSIBILITY OF SUCH DAMAGE.
|
||||
|
||||
File: frag_fusion_symbolic.py
|
||||
Author: Mathieu Bresciani <mathieu@auterion.com>
|
||||
License: BSD 3-Clause
|
||||
Description:
|
||||
"""
|
||||
|
||||
from sympy import *
|
||||
|
||||
V = Symbol("V", real=True)
|
||||
rho = Symbol("rho", real=True)
|
||||
rho_n = Symbol("rho_n", real=True)
|
||||
Mcoef = Symbol("Mcoef", real=True)
|
||||
Bcoef = Symbol("Bcoef", real=True)
|
||||
a = Symbol("a", real=True)
|
||||
|
||||
f1 = 0.5 * rho / Bcoef * V**2 + rho_n * Mcoef * V - a
|
||||
|
||||
print("If Bcoef > 0 and Mcoef > 0")
|
||||
print("V =")
|
||||
res_V = solve(f1, V)
|
||||
res_V = res_V[0]
|
||||
pprint(res_V)
|
||||
print("a_pred =")
|
||||
pprint(solve(f1, a))
|
||||
@@ -1,202 +0,0 @@
|
||||
#!/usr/bin/env python
|
||||
# -*- coding: utf-8 -*-
|
||||
"""
|
||||
Copyright (c) 2022 PX4 Development Team
|
||||
Redistribution and use in source and binary forms, with or without
|
||||
modification, are permitted provided that the following conditions
|
||||
are met:
|
||||
|
||||
1. Redistributions of source code must retain the above copyright
|
||||
notice, this list of conditions and the following disclaimer.
|
||||
2. Redistributions in binary form must reproduce the above copyright
|
||||
notice, this list of conditions and the following disclaimer in
|
||||
the documentation and/or other materials provided with the
|
||||
distribution.
|
||||
3. Neither the name PX4 nor the names of its contributors may be
|
||||
used to endorse or promote products derived from this software
|
||||
without specific prior written permission.
|
||||
|
||||
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
POSSIBILITY OF SUCH DAMAGE.
|
||||
|
||||
File: drag_replay.py
|
||||
Author: Mathieu Bresciani <mathieu@auterion.com>
|
||||
License: BSD 3-Clause
|
||||
Description:
|
||||
Find the best ballistic and momentum drag coefficients for wind estimation
|
||||
using EKF2 replay data.
|
||||
NOTE: this script currently assumes no wind.
|
||||
"""
|
||||
|
||||
import matplotlib.pylab as plt
|
||||
from pyulog import ULog
|
||||
from pyulog.px4 import PX4ULog
|
||||
import numpy as np
|
||||
import quaternion
|
||||
from scipy import optimize
|
||||
|
||||
def getAllData(logfile):
|
||||
log = ULog(logfile)
|
||||
|
||||
v_local = np.matrix([getData(log, 'vehicle_local_position', 'vx'),
|
||||
getData(log, 'vehicle_local_position', 'vy'),
|
||||
getData(log, 'vehicle_local_position', 'vz')])
|
||||
|
||||
t_v_local = ms2s(getData(log, 'vehicle_local_position', 'timestamp'))
|
||||
|
||||
accel = np.matrix([getData(log, 'sensor_combined', 'accelerometer_m_s2[0]'),
|
||||
getData(log, 'sensor_combined', 'accelerometer_m_s2[1]'),
|
||||
getData(log, 'sensor_combined', 'accelerometer_m_s2[2]')])
|
||||
t_accel = ms2s(getData(log, 'sensor_combined', 'timestamp'))
|
||||
|
||||
q = np.matrix([getData(log, 'vehicle_attitude', 'q[0]'),
|
||||
getData(log, 'vehicle_attitude', 'q[1]'),
|
||||
getData(log, 'vehicle_attitude', 'q[2]'),
|
||||
getData(log, 'vehicle_attitude', 'q[3]')])
|
||||
t_q = ms2s(getData(log, 'vehicle_attitude', 'timestamp'))
|
||||
|
||||
dist_bottom = getData(log, 'vehicle_local_position', 'dist_bottom')
|
||||
t_dist_bottom = ms2s(getData(log, 'vehicle_local_position', 'timestamp'))
|
||||
|
||||
(t_aligned, v_body_aligned, accel_aligned) = alignData(t_v_local, v_local, t_accel, accel, t_q, q, t_dist_bottom, dist_bottom)
|
||||
|
||||
t_aligned -= t_aligned[0]
|
||||
|
||||
return (t_aligned, v_body_aligned, accel_aligned)
|
||||
|
||||
def alignData(t_v, v_local, t_accel, accel, t_q, q, t_dist_bottom, dist_bottom):
|
||||
len_accel = len(t_accel)
|
||||
len_q = len(t_q)
|
||||
len_db = len(t_dist_bottom)
|
||||
i_a = 0
|
||||
i_q = 0
|
||||
i_db = 0
|
||||
v_body_aligned = np.empty((3,0))
|
||||
accel_aligned = np.empty((3,0))
|
||||
t_aligned = []
|
||||
|
||||
for i_v in range(len(t_v)):
|
||||
t = t_v[i_v]
|
||||
accel_sum = np.zeros((3,1))
|
||||
accel_count = 0
|
||||
while t_accel[i_a] < t and i_a < len_accel-1:
|
||||
accel_sum += accel[:, i_a] # Integrate accel samples between 2 velocity samples
|
||||
accel_count += 1
|
||||
i_a += 1
|
||||
while t_q[i_q] < t and i_q < len_q-1:
|
||||
i_q += 1
|
||||
while t_dist_bottom[i_db] < t and i_db < len_db-1:
|
||||
i_db += 1
|
||||
|
||||
# Only use in air data
|
||||
if dist_bottom[i_db] < 1.0 or accel_count == 0:
|
||||
continue
|
||||
|
||||
qk = np.quaternion(q[0, i_q],q[1, i_q],q[2, i_q],q[3, i_q])
|
||||
q_vl = np.quaternion(0, v_local[0, i_v], v_local[1, i_v], v_local[2, i_v])
|
||||
q_vb = qk.conjugate() * q_vl * qk # Get velocity in body frame
|
||||
vb = quaternion.as_float_array(q_vb)[1:4]
|
||||
|
||||
v_body_aligned = np.append(v_body_aligned, [[vb[0]], [vb[1]], [vb[2]]], axis=1)
|
||||
accel_aligned = np.append(accel_aligned, accel_sum / accel_count, axis=1)
|
||||
t_aligned.append(t)
|
||||
|
||||
return (t_aligned, v_body_aligned, np.asarray(accel_aligned))
|
||||
|
||||
def getData(log, topic_name, variable_name, instance=0):
|
||||
variable_data = np.array([])
|
||||
for elem in log.data_list:
|
||||
if elem.name == topic_name:
|
||||
if instance == elem.multi_id:
|
||||
variable_data = elem.data[variable_name]
|
||||
break
|
||||
|
||||
return variable_data
|
||||
|
||||
def ms2s(time_ms):
|
||||
return time_ms * 1e-6
|
||||
|
||||
def run(logfile):
|
||||
(t, v_body, a_body) = getAllData(logfile)
|
||||
|
||||
rho = 1.15 # air densitiy
|
||||
rho15 = 1.225 # air density at 15 degC
|
||||
|
||||
# x[0]: momentum drag, scales with v
|
||||
# x[1]: inverse of ballistic coefficient (X body axis), scales with v^2
|
||||
# x[2]: inverse of ballistic coefficient (Y body axis), scales with v^2
|
||||
predict_acc_x = lambda x: -v_body[0] * x[0] - 0.5 * rho * v_body[0]**2 * np.sign(v_body[0]) * x[1]
|
||||
predict_acc_y = lambda x: -v_body[1] * x[0] - 0.5 * rho * v_body[1]**2 * np.sign(v_body[1]) * x[2]
|
||||
|
||||
J = lambda x: np.sum(np.power(abs(a_body[0]-predict_acc_x(x)), 2.0) + np.power(abs(a_body[1]-predict_acc_y(x)), 2.0)) # cost function
|
||||
|
||||
x0 = [0.15, 1/100, 1/100] # initial conditions
|
||||
res = optimize.minimize(J, x0, method='nelder-mead', bounds=[(0,1),(0,10),(0,10)], options={'disp': True})
|
||||
|
||||
# Convert results to parameters
|
||||
innov_var = J(res.x) / (len(v_body[0]) + len(v_body[1]))
|
||||
mcoef = res.x[0] / np.sqrt(rho / rho15)
|
||||
|
||||
bcoef_x = 0.0
|
||||
bcoef_y = 0.0
|
||||
|
||||
if res.x[1] > 1/200:
|
||||
bcoef_x = 1/res.x[1]
|
||||
|
||||
if res.x[2] > 1/200:
|
||||
bcoef_y = 1/res.x[2]
|
||||
|
||||
print(f"param set EKF2_BCOEF_X {bcoef_x:.1f}")
|
||||
print(f"param set EKF2_BCOEF_Y {bcoef_y:.1f}")
|
||||
print(f"param set EKF2_MCOEF {mcoef:.2f}")
|
||||
print(f"/!\EXPERIMENTAL param set EKF2_DRAG_NOISE {innov_var:.2f}")
|
||||
|
||||
# Plot data
|
||||
plt.figure(1)
|
||||
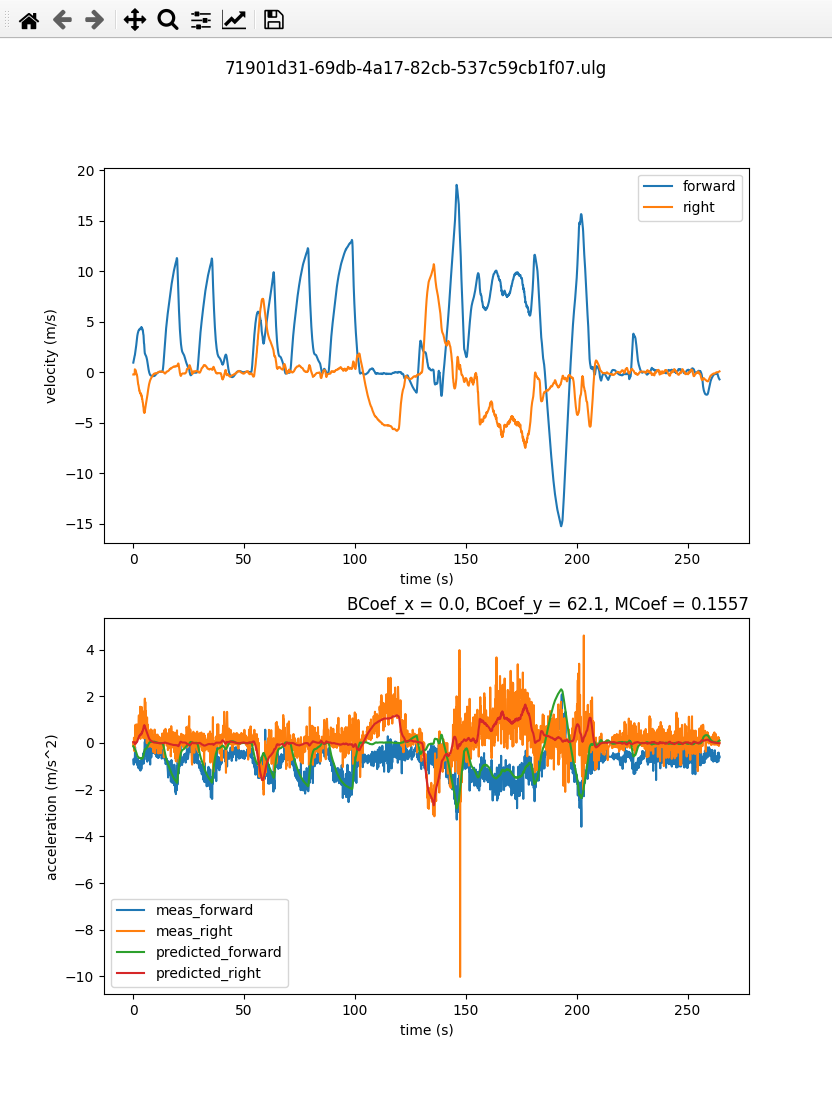
plt.suptitle(logfile.split('/')[-1])
|
||||
ax1 = plt.subplot(2, 1, 1)
|
||||
ax1.plot(t, v_body[0])
|
||||
ax1.plot(t, v_body[1])
|
||||
ax1.set_xlabel("time (s)")
|
||||
ax1.set_ylabel("velocity (m/s)")
|
||||
ax1.legend(["forward", "right"])
|
||||
|
||||
ax2 = plt.subplot(2, 1, 2, sharex=ax1)
|
||||
ax2.set_title(f"BCoef_x = {bcoef_x:.1f}, BCoef_y = {bcoef_y:.1f}, MCoef = {mcoef:.4f}", loc="right")
|
||||
ax2.plot(t, a_body[0])
|
||||
ax2.plot(t, a_body[1])
|
||||
ax2.plot(t, predict_acc_x(res.x))
|
||||
ax2.plot(t, predict_acc_y(res.x))
|
||||
ax2.set_xlabel("time (s)")
|
||||
ax2.set_ylabel("acceleration (m/s^2)")
|
||||
ax2.legend(["meas_forward", "meas_right", "predicted_forward", "predicted_right"])
|
||||
plt.show()
|
||||
|
||||
if __name__ == '__main__':
|
||||
import os
|
||||
import argparse
|
||||
|
||||
# Get the path of this script (without file name)
|
||||
script_path = os.path.split(os.path.realpath(__file__))[0]
|
||||
|
||||
# Parse arguments
|
||||
parser = argparse.ArgumentParser(
|
||||
description='Estimate mag biases from ULog file')
|
||||
|
||||
# Provide parameter file path and name
|
||||
parser.add_argument('logfile', help='Full ulog file path, name and extension', type=str)
|
||||
args = parser.parse_args()
|
||||
|
||||
logfile = os.path.abspath(args.logfile) # Convert to absolute path
|
||||
|
||||
run(logfile)
|
||||
@@ -1,32 +0,0 @@
|
||||
# PX4 Drag fusion parameter tuning algorithm
|
||||
In PX4, drag fusion can be enabled in order to estimate the wind when flying a multirotor, assuming that the body vertical acceleration is produced by the rotors and that the lateral forces are produced by drag.
|
||||
The model assumes a combination of:
|
||||
1. momentum drag: created by the rotors changing the direction of the incoming air, linear to the relative airspeed. Parameter `EKF2_MCOEF`
|
||||
2. bluff body drag: created by the wetted area of the aircraft, quadratic to the relative airspeed. Parameters `EKF2_BCOEF_X` and `EKF2_BCOEF_Y`
|
||||
|
||||
The python script was created to automate the tuning of the aforementioned parameters using flight test data.
|
||||
|
||||
## How to use this script
|
||||
First, a flight log with enough information is required in order to accurately estimate the parameters.
|
||||
The best way to do this is to fly the drone in altitude mode, accelerate to a moderate-high speed and let the drone slow-down by its own drag.
|
||||
Repeat the same maneuver in all directions and several times to obtain a good dataset.
|
||||
|
||||
/!\ NOTE: the current state of this script assumes no wind. Some modifications are required to estimate both the wind and the parameters at the same time.
|
||||
|
||||
Then, install the required python packages:
|
||||
```
|
||||
pip install -r requirements.txt
|
||||
```
|
||||
and run the script and give it the log file as an argument:
|
||||
```
|
||||
python drag_replay.py <logfilename.ulg>
|
||||
```
|
||||
|
||||
The estimated parameters are displayed in the console and the fit quality is shown in a plot:
|
||||
```
|
||||
param set EKF2_BCOEF_X 0.0
|
||||
param set EKF2_BCOEF_Y 62.1
|
||||
param set EKF2_MCOEF 0.16
|
||||
/!\EXPERIMENTAL param set EKF2_DRAG_NOISE 0.31
|
||||
```
|
||||
|
||||
@@ -1,6 +0,0 @@
|
||||
matplotlib==3.5.1
|
||||
numpy==1.22.2
|
||||
pyulog==0.9.0
|
||||
quaternion==3.5.2.post4
|
||||
scipy==1.8.0
|
||||
sympy==1.10.1
|
||||
@@ -250,32 +250,18 @@ def create_pdf_report(ulog: ULog, multi_instance: int, output_plot_filename: str
|
||||
data_plot.save()
|
||||
data_plot.close()
|
||||
|
||||
|
||||
# Plot the EKF IMU vibration metrics
|
||||
for imu_status_instance in range(4):
|
||||
try:
|
||||
vehicle_imu_status_data = ulog.get_dataset('vehicle_imu_status', imu_status_instance).data
|
||||
|
||||
imu_status_time = 1e-6 * vehicle_imu_status_data['timestamp']
|
||||
|
||||
if vehicle_imu_status_data['accel_device_id'][0] == estimator_status['accel_device_id'][0]:
|
||||
|
||||
scaled_estimator_status = {'delta_angle_coning_metric': 1000. * vehicle_imu_status_data['delta_angle_coning_metric'],
|
||||
'gyro_vibration_metric': vehicle_imu_status_data['gyro_vibration_metric'],
|
||||
'accel_vibration_metric': vehicle_imu_status_data['accel_vibration_metric']
|
||||
}
|
||||
data_plot = CheckFlagsPlot(
|
||||
imu_status_time, scaled_estimator_status, [['delta_angle_coning_metric'], ['gyro_vibration_metric'], ['accel_vibration_metric']],
|
||||
x_label='time (sec)',
|
||||
y_labels=['Del Ang Coning (mrad^2)', 'HF Gyro (rad/s)', 'HF accel (m/s/s)'],
|
||||
plot_title='IMU Vibration Metrics',
|
||||
pdf_handle=pdf_pages, annotate=True)
|
||||
data_plot.save()
|
||||
data_plot.close()
|
||||
|
||||
except:
|
||||
pass
|
||||
|
||||
scaled_estimator_status = {'vibe[0]': 1000. * estimator_status['vibe[0]'],
|
||||
'vibe[1]': 1000. * estimator_status['vibe[1]'],
|
||||
'vibe[2]': estimator_status['vibe[2]']
|
||||
}
|
||||
data_plot = CheckFlagsPlot(
|
||||
status_time, scaled_estimator_status, [['vibe[0]'], ['vibe[1]'], ['vibe[2]']],
|
||||
x_label='time (sec)', y_labels=['Del Ang Coning (mrad)', 'HF Del Ang (mrad)',
|
||||
'HF Del Vel (m/s)'], plot_title='IMU Vibration Metrics',
|
||||
pdf_handle=pdf_pages, annotate=True)
|
||||
data_plot.save()
|
||||
data_plot.close()
|
||||
|
||||
# Plot the EKF output observer tracking errors
|
||||
scaled_innovations = {
|
||||
|
||||
@@ -139,7 +139,6 @@ mc_hover_thrust_estimator,CONFIG_MODULES_MC_HOVER_THRUST_ESTIMATOR=y
|
||||
mc_pos_control,CONFIG_MODULES_MC_POS_CONTROL=y
|
||||
mc_rate_control,CONFIG_MODULES_MC_RATE_CONTROL=y
|
||||
micrortps_bridge,CONFIG_MODULES_MICRORTPS_BRIDGE=y
|
||||
microdds_client,CONFIG_MODULES_MICRODDS_CLIENT=y
|
||||
navigator,CONFIG_MODULES_NAVIGATOR=y
|
||||
px4iofirmware,CONFIG_MODULES_PX4IOFIRMWARE=y
|
||||
rc_update,CONFIG_MODULES_RC_UPDATE=y
|
||||
|
||||
+1
-1
Submodule Tools/sitl_gazebo updated: 2cf56d0bf8...25138e803e
@@ -111,6 +111,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -124,6 +125,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -227,5 +229,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -51,7 +51,7 @@
|
||||
#include <nuttx/usb/usbdev.h>
|
||||
#include <nuttx/usb/usbdev_trace.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <stm32.h>
|
||||
#include "board_config.h"
|
||||
|
||||
|
||||
@@ -58,4 +58,4 @@ CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_STM32_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -88,6 +88,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -101,6 +102,7 @@ CONFIG_SCHED_HPWORKPRIORITY=254
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=3000
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -150,5 +152,5 @@ CONFIG_USART2_RXBUFSIZE=600
|
||||
CONFIG_USART2_SERIAL_CONSOLE=y
|
||||
CONFIG_USART2_TXBUFSIZE=1100
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2624
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2624
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -58,4 +58,4 @@ CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_STM32_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -90,6 +90,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -103,6 +104,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -155,5 +157,5 @@ CONFIG_USART2_RXBUFSIZE=600
|
||||
CONFIG_USART2_SERIAL_CONSOLE=y
|
||||
CONFIG_USART2_TXBUFSIZE=1100
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2624
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2624
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -58,4 +58,4 @@ CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_STM32_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -90,6 +90,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -103,6 +104,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -156,5 +158,5 @@ CONFIG_USART2_RXBUFSIZE=600
|
||||
CONFIG_USART2_SERIAL_CONSOLE=y
|
||||
CONFIG_USART2_TXBUFSIZE=1100
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2624
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2624
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -1,6 +0,0 @@
|
||||
CONFIG_BOARD_TOOLCHAIN="arm-none-eabi"
|
||||
CONFIG_BOARD_ARCHITECTURE="cortex-m4"
|
||||
CONFIG_BOARD_ROMFSROOT=""
|
||||
CONFIG_BOARD_CONSTRAINED_MEMORY=y
|
||||
CONFIG_DRIVERS_BOOTLOADERS=y
|
||||
CONFIG_NSH_BUILTIN_APPS=y
|
||||
@@ -1,37 +0,0 @@
|
||||
CONFIG_BOARD_TOOLCHAIN="arm-none-eabi"
|
||||
CONFIG_BOARD_ARCHITECTURE="cortex-m4"
|
||||
CONFIG_BOARD_ROMFSROOT="cannode"
|
||||
CONFIG_BOARD_CONSTRAINED_FLASH=y
|
||||
#CONFIG_BOARD_NO_HELP=y
|
||||
CONFIG_BOARD_CONSTRAINED_MEMORY=y
|
||||
CONFIG_BOARD_EXTERNAL_METADATA=y
|
||||
CONFIG_COMMON_BAROMETERS=y
|
||||
CONFIG_COMMON_DIFFERENTIAL_PRESSURE=y
|
||||
CONFIG_COMMON_DISTANCE_SENSOR=y
|
||||
CONFIG_COMMON_HYGROMETERS=y
|
||||
CONFIG_COMMON_MAGNETOMETER=y
|
||||
CONFIG_COMMON_LIGHT=y
|
||||
CONFIG_DRIVERS_BATT_SMBUS=y
|
||||
CONFIG_DRIVERS_BOOTLOADERS=y
|
||||
CONFIG_DRIVERS_GPS=y
|
||||
CONFIG_DRIVERS_IMU_ANALOG_DEVICES_ADIS16448=y
|
||||
CONFIG_DRIVERS_IMU_INVENSENSE_ICM20948=y
|
||||
CONFIG_DRIVERS_IMU_INVENSENSE_ICM42688P=y
|
||||
CONFIG_DRIVERS_IRLOCK=y
|
||||
CONFIG_DRIVERS_PWM_OUT=y
|
||||
CONFIG_BOARD_UAVCAN_INTERFACES=1
|
||||
CONFIG_DRIVERS_UAVCANNODE=y
|
||||
CONFIG_MODULES_CONTROL_ALLOCATOR=y
|
||||
#CONFIG_MODULES_SENSORS=y
|
||||
CONFIG_NSH_BUILTIN_APPS=y
|
||||
CONFIG_SYSTEMCMDS_ACTUATOR_TEST=y
|
||||
CONFIG_SYSTEMCMDS_I2CDETECT=y
|
||||
CONFIG_SYSTEMCMDS_LED_CONTROL=y
|
||||
CONFIG_SYSTEMCMDS_MIXER=y
|
||||
CONFIG_SYSTEMCMDS_UORB=y
|
||||
CONFIG_SYSTEMCMDS_PARAM=y
|
||||
CONFIG_SYSTEMCMDS_TOP=y
|
||||
CONFIG_SYSTEMCMDS_TOPIC_LISTENER=y
|
||||
CONFIG_SYSTEMCMDS_PWM=y
|
||||
CONFIG_SYSTEMCMDS_REBOOT=y
|
||||
CONFIG_SYSTEMCMDS_WORK_QUEUE=y
|
||||
@@ -1,13 +0,0 @@
|
||||
{
|
||||
"board_id": 83,
|
||||
"magic": "PX4FWv1",
|
||||
"description": "Firmware for the ARK CANnode board",
|
||||
"image": "",
|
||||
"build_time": 0,
|
||||
"summary": "ARKCANNODE",
|
||||
"version": "0.1",
|
||||
"image_size": 0,
|
||||
"image_maxsize": 2080768,
|
||||
"git_identity": "",
|
||||
"board_revision": 0
|
||||
}
|
||||
@@ -1,7 +0,0 @@
|
||||
#!/bin/sh
|
||||
#
|
||||
# board specific defaults
|
||||
#------------------------------------------------------------------------------
|
||||
pwm_out start
|
||||
|
||||
control_allocator start
|
||||
@@ -1,118 +0,0 @@
|
||||
#!/bin/sh
|
||||
#
|
||||
# board sensors init
|
||||
#------------------------------------------------------------------------------
|
||||
icm42688p -R 0 -s start
|
||||
|
||||
if param compare -s SENS_EN_BATT 1
|
||||
then
|
||||
batt_smbus start -X
|
||||
fi
|
||||
|
||||
# Lidar-Lite on I2C
|
||||
if param compare -s SENS_EN_LL40LS 2
|
||||
then
|
||||
ll40ls start -X
|
||||
fi
|
||||
|
||||
# mappydot lidar sensor
|
||||
if param compare -s SENS_EN_MPDT 1
|
||||
then
|
||||
mappydot start -X
|
||||
fi
|
||||
|
||||
# mb12xx sonar sensor
|
||||
if param greater -s SENS_EN_MB12XX 0
|
||||
then
|
||||
mb12xx start -X
|
||||
fi
|
||||
|
||||
# Lightware i2c lidar sensor
|
||||
if param greater -s SENS_EN_SF1XX 0
|
||||
then
|
||||
lightware_laser_i2c start -X
|
||||
fi
|
||||
|
||||
# vl53l1x i2c distance sensor
|
||||
if param compare -s SENS_EN_VL53L1X 1
|
||||
then
|
||||
vl53l1x start -X
|
||||
fi
|
||||
|
||||
# ADIS16448 spi external IMU
|
||||
if param compare -s SENS_EN_ADIS164X 1
|
||||
then
|
||||
if param compare -s SENS_OR_ADIS164X 0
|
||||
then
|
||||
adis16448 -S start
|
||||
fi
|
||||
if param compare -s SENS_OR_ADIS164X 4
|
||||
then
|
||||
adis16448 -S start -R 4
|
||||
fi
|
||||
fi
|
||||
|
||||
# Eagle Tree airspeed sensor external I2C
|
||||
if param compare -s SENS_EN_ETSASPD 1
|
||||
then
|
||||
ets_airspeed start -X
|
||||
fi
|
||||
|
||||
# Sensirion SDP3X differential pressure sensor external I2C
|
||||
if param compare -s SENS_EN_SDP3X 1
|
||||
then
|
||||
if ! sdp3x_airspeed start -X
|
||||
then
|
||||
# try another common address
|
||||
sdp3x_airspeed start -X -a 0x22
|
||||
fi
|
||||
fi
|
||||
|
||||
# SHT3x temperature and hygrometer sensor, external I2C
|
||||
if param compare -s SENS_EN_SHT3X 1
|
||||
then
|
||||
sht3x start -X
|
||||
sht3x start -X -a 0x45
|
||||
fi
|
||||
|
||||
# TE MS4525 differential pressure sensor external I2C
|
||||
if param compare -s SENS_EN_MS4525 1
|
||||
then
|
||||
ms4525_airspeed start -X
|
||||
fi
|
||||
|
||||
# TE MS5525 differential pressure sensor external I2C
|
||||
if param compare -s SENS_EN_MS5525 1
|
||||
then
|
||||
ms5525_airspeed start -X
|
||||
fi
|
||||
|
||||
# IR-LOCK sensor external I2C
|
||||
if param compare -s SENS_EN_IRLOCK 1
|
||||
then
|
||||
irlock start -X
|
||||
fi
|
||||
|
||||
# SPL06 sensor external I2C
|
||||
if param compare -s SENS_EN_SPL06 1
|
||||
then
|
||||
spl06 -X start
|
||||
spl06 -X -a 0x77 start
|
||||
fi
|
||||
|
||||
gps start -d /dev/ttyS0 -p ubx
|
||||
|
||||
# probe for optional external I2C devices
|
||||
icm20948_i2c_passthrough -X -q start
|
||||
|
||||
# compasses
|
||||
hmc5883 -T -X -q start
|
||||
ist8308 -X -q start
|
||||
ist8310 -X -q start
|
||||
lis2mdl -X -q start
|
||||
lis3mdl -X -q start
|
||||
qmc5883l -X -q start
|
||||
rm3100 -X -q start
|
||||
|
||||
# start last (wait for possible icm20948 passthrough mode)
|
||||
ak09916 -X -q start
|
||||
@@ -1,61 +0,0 @@
|
||||
#
|
||||
# This file is autogenerated: PLEASE DO NOT EDIT IT.
|
||||
#
|
||||
# You can use "make menuconfig" to make any modifications to the installed .config file.
|
||||
# You can then do "make savedefconfig" to generate a new defconfig file that includes your
|
||||
# modifications.
|
||||
#
|
||||
CONFIG_ARCH="arm"
|
||||
CONFIG_ARCH_BOARD_CUSTOM=y
|
||||
CONFIG_ARCH_BOARD_CUSTOM_DIR="../../../../boards/ark/cannode/nuttx-config"
|
||||
CONFIG_ARCH_BOARD_CUSTOM_DIR_RELPATH=y
|
||||
CONFIG_ARCH_BOARD_CUSTOM_NAME="px4"
|
||||
CONFIG_ARCH_CHIP="stm32"
|
||||
CONFIG_ARCH_CHIP_STM32=y
|
||||
CONFIG_ARCH_CHIP_STM32F412CE=y
|
||||
CONFIG_ARCH_INTERRUPTSTACK=4096
|
||||
CONFIG_ARMV7M_MEMCPY=y
|
||||
CONFIG_ARMV7M_USEBASEPRI=y
|
||||
CONFIG_BINFMT_DISABLE=y
|
||||
CONFIG_BOARD_LOOPSPERMSEC=16717
|
||||
CONFIG_C99_BOOL8=y
|
||||
CONFIG_CLOCK_MONOTONIC=y
|
||||
CONFIG_DEBUG_FULLOPT=y
|
||||
CONFIG_DEBUG_SYMBOLS=y
|
||||
CONFIG_DEFAULT_SMALL=y
|
||||
CONFIG_DISABLE_MOUNTPOINT=y
|
||||
CONFIG_DISABLE_MQUEUE=y
|
||||
CONFIG_DISABLE_PTHREAD=y
|
||||
CONFIG_EXPERIMENTAL=y
|
||||
CONFIG_FDCLONE_DISABLE=y
|
||||
CONFIG_FDCLONE_STDIO=y
|
||||
CONFIG_HAVE_CXX=y
|
||||
CONFIG_HAVE_CXXINITIALIZE=y
|
||||
CONFIG_IDLETHREAD_STACKSIZE=4096
|
||||
CONFIG_LIBC_FLOATINGPOINT=y
|
||||
CONFIG_LIBC_LONG_LONG=y
|
||||
CONFIG_LIBC_STRERROR=y
|
||||
CONFIG_LIB_BOARDCTL=y
|
||||
CONFIG_FS_PROCFS_MAX_TASKS=0
|
||||
CONFIG_MM_REGIONS=2
|
||||
CONFIG_NAME_MAX=0
|
||||
CONFIG_NUNGET_CHARS=0
|
||||
CONFIG_PREALLOC_TIMERS=0
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAM_SIZE=262144
|
||||
CONFIG_RAM_START=0x20010000
|
||||
CONFIG_RAW_BINARY=y
|
||||
CONFIG_SDCLONE_DISABLE=y
|
||||
CONFIG_SIG_DEFAULT=y
|
||||
CONFIG_SIG_SIGALRM_ACTION=y
|
||||
CONFIG_SIG_SIGUSR1_ACTION=y
|
||||
CONFIG_SIG_SIGUSR2_ACTION=y
|
||||
CONFIG_STACK_COLORATION=y
|
||||
CONFIG_START_DAY=30
|
||||
CONFIG_START_MONTH=11
|
||||
CONFIG_STDIO_DISABLE_BUFFERING=y
|
||||
CONFIG_STM32_FLASH_CONFIG_G=y
|
||||
CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
@@ -1,149 +0,0 @@
|
||||
/************************************************************************************
|
||||
* configs/px4fmu/include/board.h
|
||||
* include/arch/board/board.h
|
||||
*
|
||||
* Copyright (C) 2009 Gregory Nutt. All rights reserved.
|
||||
* Author: Gregory Nutt <gnutt@nuttx.org>
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name NuttX nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
************************************************************************************/
|
||||
#include "board_dma_map.h"
|
||||
|
||||
#ifndef __ARCH_BOARD_BOARD_H
|
||||
#define __ARCH_BOARD_BOARD_H
|
||||
|
||||
#include <nuttx/config.h>
|
||||
#ifndef __ASSEMBLY__
|
||||
# include <stdint.h>
|
||||
#endif
|
||||
|
||||
#include <stm32.h>
|
||||
|
||||
/* HSI - 8 MHz RC factory-trimmed
|
||||
* LSI - 32 KHz RC
|
||||
* HSE - 8 MHz Crystal
|
||||
* LSE - not installed
|
||||
*/
|
||||
#define STM32_BOARD_USEHSE 1
|
||||
#define STM32_BOARD_XTAL 8000000
|
||||
#define STM32_HSE_FREQUENCY STM32_BOARD_XTAL
|
||||
|
||||
#define STM32_HSI_FREQUENCY 16000000ul
|
||||
#define STM32_LSI_FREQUENCY 32000
|
||||
|
||||
/* Main PLL Configuration */
|
||||
#define STM32_PLLCFG_PLLM RCC_PLLCFG_PLLM(8)
|
||||
#define STM32_PLLCFG_PLLN RCC_PLLCFG_PLLN(384)
|
||||
#define STM32_PLLCFG_PLLP RCC_PLLCFG_PLLP_4
|
||||
#define STM32_PLLCFG_PLLQ RCC_PLLCFG_PLLQ(8)
|
||||
#define STM32_PLLCFG_PLLR RCC_PLLCFG_PLLR(2)
|
||||
|
||||
#define STM32_RCC_PLLI2SCFGR_PLLI2SM RCC_PLLI2SCFGR_PLLI2SM(16)
|
||||
#define STM32_RCC_PLLI2SCFGR_PLLI2SN RCC_PLLI2SCFGR_PLLI2SN(192)
|
||||
#define STM32_RCC_PLLI2SCFGR_PLLI2SQ RCC_PLLI2SCFGR_PLLI2SQ(2)
|
||||
#define STM32_RCC_PLLI2SCFGR_PLLI2SR RCC_PLLI2SCFGR_PLLI2SR(2)
|
||||
#define STM32_RCC_PLLI2SCFGR_PLLI2SSRC RCC_PLLI2SCFGR_PLLI2SSRC(0) /* HSE or HSI depending on PLLSRC of PLLCFGR*/
|
||||
|
||||
#define STM32_RCC_DCKCFGR2_CK48MSEL RCC_DCKCFGR2_CK48MSEL_PLL
|
||||
#define STM32_RCC_DCKCFGR2_FMPI2C1SEL RCC_DCKCFGR2_FMPI2C1SEL_APB
|
||||
#define STM32_RCC_DCKCFGR2_SDIOSEL RCC_DCKCFGR2_SDIOSEL_48MHZ
|
||||
|
||||
#define STM32_SYSCLK_FREQUENCY 96000000ul
|
||||
|
||||
/* AHB clock (HCLK) is SYSCLK (96MHz) */
|
||||
#define STM32_RCC_CFGR_HPRE RCC_CFGR_HPRE_SYSCLK /* HCLK = SYSCLK / 1 */
|
||||
#define STM32_HCLK_FREQUENCY STM32_SYSCLK_FREQUENCY
|
||||
#define STM32_BOARD_HCLK STM32_HCLK_FREQUENCY /* Same as above, to satisfy compiler */
|
||||
|
||||
/* APB1 clock (PCLK1) is HCLK/2 (48MHz) */
|
||||
#define STM32_RCC_CFGR_PPRE1 RCC_CFGR_PPRE1_HCLKd2 /* PCLK1 = HCLK / 2 */
|
||||
#define STM32_PCLK1_FREQUENCY (STM32_HCLK_FREQUENCY/2)
|
||||
|
||||
/* Timers driven from APB1 will be twice PCLK1 (see page 112 of reference manual) */
|
||||
#define STM32_APB1_TIM2_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM3_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM4_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM5_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM6_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM7_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
#define STM32_APB1_TIM12_CLKIN (2*STM32_PCLK1_FREQUENCY)
|
||||
|
||||
/* APB2 clock (PCLK2) is HCLK (96MHz) */
|
||||
#define STM32_RCC_CFGR_PPRE2 RCC_CFGR_PPRE2_HCLK /* PCLK2 = HCLK */
|
||||
#define STM32_PCLK2_FREQUENCY (STM32_HCLK_FREQUENCY)
|
||||
|
||||
/* Timers driven from APB2 will be PCLK2 since no prescale division */
|
||||
#define STM32_APB2_TIM1_CLKIN (STM32_PCLK2_FREQUENCY)
|
||||
#define STM32_APB2_TIM8_CLKIN (STM32_PCLK2_FREQUENCY)
|
||||
#define STM32_APB2_TIM9_CLKIN (STM32_PCLK2_FREQUENCY)
|
||||
#define STM32_APB2_TIM10_CLKIN (STM32_PCLK2_FREQUENCY)
|
||||
#define STM32_APB2_TIM11_CLKIN (STM32_PCLK2_FREQUENCY)
|
||||
|
||||
/* Timer Frequencies, if APBx is set to 1, frequency is same to APBx otherwise frequency is 2xAPBx. */
|
||||
#define BOARD_TIM2_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM3_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM4_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM5_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM6_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM7_FREQUENCY (2 * STM32_PCLK1_FREQUENCY)
|
||||
#define BOARD_TIM8_FREQUENCY (2 * STM32_PCLK2_FREQUENCY)
|
||||
|
||||
/* Alternate function pin selections ************************************************/
|
||||
|
||||
/* UARTs */
|
||||
#define GPIO_USART1_RX GPIO_USART1_RX_2
|
||||
#define GPIO_USART1_TX GPIO_USART1_TX_3
|
||||
|
||||
#define GPIO_USART2_RX GPIO_USART2_RX_1
|
||||
#define GPIO_USART2_TX GPIO_USART2_TX_1
|
||||
|
||||
/* CAN */
|
||||
#define GPIO_CAN1_RX GPIO_CAN1_RX_1
|
||||
#define GPIO_CAN1_TX GPIO_CAN1_TX_1
|
||||
|
||||
/* SPI */
|
||||
#define GPIO_SPI1_MISO GPIO_SPI1_MISO_1
|
||||
#define GPIO_SPI1_MOSI GPIO_SPI1_MOSI_1
|
||||
#define GPIO_SPI1_SCK GPIO_SPI1_SCK_1
|
||||
|
||||
#define GPIO_SPI2_MISO GPIO_SPI2_MISO_1 /* PB14 */
|
||||
#define GPIO_SPI2_MOSI GPIO_SPI2_MOSI_1 /* PB15 */
|
||||
#define GPIO_SPI2_SCK GPIO_SPI2_SCK_2 /* PB13 */
|
||||
|
||||
/* I2C */
|
||||
#define GPIO_MCU_I2C1_SCL
|
||||
#define GPIO_MCU_I2C1_SDA
|
||||
|
||||
#define GPIO_I2C1_SCL GPIO_I2C1_SCL_1
|
||||
#define GPIO_I2C1_SDA GPIO_I2C1_SDA_2
|
||||
|
||||
#define GPIO_I2C1_SCL_GPIO (GPIO_OUTPUT | GPIO_OPENDRAIN |GPIO_SPEED_50MHz | GPIO_OUTPUT_SET | GPIO_PORTB | GPIO_PIN6)
|
||||
#define GPIO_I2C1_SDA_GPIO (GPIO_OUTPUT | GPIO_OPENDRAIN |GPIO_SPEED_50MHz | GPIO_OUTPUT_SET | GPIO_PORTB | GPIO_PIN7)
|
||||
|
||||
#endif /* __ARCH_BOARD_BOARD_H */
|
||||
@@ -1,44 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
#pragma once
|
||||
|
||||
// DMA1 Channel/Stream Selections
|
||||
//--------------------------------------------//---------------------------//----------------
|
||||
#define DMACHAN_SPI2_RX DMAMAP_SPI2_RX // DMA1, Stream 3, Channel 0
|
||||
#define DMACHAN_SPI2_TX DMAMAP_SPI2_TX // DMA1, Stream 4, Channel 0
|
||||
|
||||
// DMA2 Channel/Stream Selections
|
||||
//--------------------------------------------//---------------------------//----------------
|
||||
#define DMACHAN_SPI1_RX DMAMAP_SPI1_RX_2 // DMA2, Stream 2, Channel 3
|
||||
#define DMACHAN_SPI1_TX DMAMAP_SPI1_TX_2 // DMA2, Stream 5, Channel 3
|
||||
@@ -1,134 +0,0 @@
|
||||
/****************************************************************************
|
||||
* nuttx-config/scripts/canbootloader_script.ld
|
||||
*
|
||||
* Copyright (C) 2015 Gregory Nutt. All rights reserved.
|
||||
* Author: Gregory Nutt <gnutt@nuttx.org>
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name NuttX nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/* The STM32F412 has 512Kb of FLASH beginning at address 0x0800:0000 and
|
||||
* 256Kb of SRAM. SRAM is split up into three blocks:
|
||||
*
|
||||
* 1) 112Kb of SRAM beginning at address 0x2000:0000
|
||||
* 2) 16Kb of SRAM beginning at address 0x2001:c000
|
||||
* 3) 64Kb of SRAM beginning at address 0x2002:0000
|
||||
* 4) 64Kb of TCM SRAM beginning at address 0x1000:0000
|
||||
*
|
||||
* When booting from FLASH, FLASH memory is aliased to address 0x0000:0000
|
||||
* where the code expects to begin execution by jumping to the entry point in
|
||||
* the 0x0800:0000 address range.
|
||||
*
|
||||
* The first 0x10000 of flash is reserved for the bootloader.
|
||||
*/
|
||||
|
||||
MEMORY
|
||||
{
|
||||
flash (rx) : ORIGIN = 0x08000000, LENGTH = 32K
|
||||
sram (rwx) : ORIGIN = 0x20000000, LENGTH = 192K
|
||||
}
|
||||
|
||||
OUTPUT_ARCH(arm)
|
||||
|
||||
ENTRY(__start) /* treat __start as the anchor for dead code stripping */
|
||||
EXTERN(_vectors) /* force the vectors to be included in the output */
|
||||
|
||||
/*
|
||||
* Ensure that abort() is present in the final object. The exception handling
|
||||
* code pulled in by libgcc.a requires it (and that code cannot be easily avoided).
|
||||
*/
|
||||
EXTERN(abort)
|
||||
SECTIONS
|
||||
{
|
||||
.text : {
|
||||
_stext = ABSOLUTE(.);
|
||||
*(.vectors)
|
||||
*(.text .text.*)
|
||||
*(.fixup)
|
||||
*(.gnu.warning)
|
||||
*(.rodata .rodata.*)
|
||||
*(.gnu.linkonce.t.*)
|
||||
*(.got)
|
||||
*(.gcc_except_table)
|
||||
*(.gnu.linkonce.r.*)
|
||||
_etext = ABSOLUTE(.);
|
||||
} > flash
|
||||
|
||||
/*
|
||||
* Init functions (static constructors and the like)
|
||||
*/
|
||||
.init_section : {
|
||||
_sinit = ABSOLUTE(.);
|
||||
KEEP(*(.init_array .init_array.*))
|
||||
_einit = ABSOLUTE(.);
|
||||
} > flash
|
||||
|
||||
.ARM.extab : {
|
||||
*(.ARM.extab*)
|
||||
} > flash
|
||||
|
||||
__exidx_start = ABSOLUTE(.);
|
||||
.ARM.exidx : {
|
||||
*(.ARM.exidx*)
|
||||
} > flash
|
||||
__exidx_end = ABSOLUTE(.);
|
||||
|
||||
_eronly = ABSOLUTE(.);
|
||||
|
||||
.data : {
|
||||
_sdata = ABSOLUTE(.);
|
||||
*(.data .data.*)
|
||||
*(.gnu.linkonce.d.*)
|
||||
CONSTRUCTORS
|
||||
_edata = ABSOLUTE(.);
|
||||
} > sram AT > flash
|
||||
|
||||
.bss : {
|
||||
_sbss = ABSOLUTE(.);
|
||||
*(.bss .bss.*)
|
||||
*(.gnu.linkonce.b.*)
|
||||
*(COMMON)
|
||||
. = ALIGN(4);
|
||||
_ebss = ABSOLUTE(.);
|
||||
} > sram
|
||||
|
||||
/* Stabs debugging sections. */
|
||||
.stab 0 : { *(.stab) }
|
||||
.stabstr 0 : { *(.stabstr) }
|
||||
.stab.excl 0 : { *(.stab.excl) }
|
||||
.stab.exclstr 0 : { *(.stab.exclstr) }
|
||||
.stab.index 0 : { *(.stab.index) }
|
||||
.stab.indexstr 0 : { *(.stab.indexstr) }
|
||||
.comment 0 : { *(.comment) }
|
||||
.debug_abbrev 0 : { *(.debug_abbrev) }
|
||||
.debug_info 0 : { *(.debug_info) }
|
||||
.debug_line 0 : { *(.debug_line) }
|
||||
.debug_pubnames 0 : { *(.debug_pubnames) }
|
||||
.debug_aranges 0 : { *(.debug_aranges) }
|
||||
}
|
||||
@@ -1,146 +0,0 @@
|
||||
/****************************************************************************
|
||||
* scripts/ld.script
|
||||
*
|
||||
* Copyright (C) 2011 Gregory Nutt. All rights reserved.
|
||||
* Author: Gregory Nutt <gnutt@nuttx.org>
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name NuttX nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/* The STM32F412CG has 1Mb of FLASH beginning at address 0x0800:0000 and
|
||||
* 256Kb of SRAM. SRAM is split up into three blocks:
|
||||
*
|
||||
* 1) 112Kb of SRAM beginning at address 0x2000:0000
|
||||
* 2) 16Kb of SRAM beginning at address 0x2001:c000
|
||||
* 3) 64Kb of SRAM beginning at address 0x2002:0000
|
||||
* 4) 64Kb of TCM SRAM beginning at address 0x1000:0000
|
||||
*
|
||||
* When booting from FLASH, FLASH memory is aliased to address 0x0000:0000
|
||||
* where the code expects to begin execution by jumping to the entry point in
|
||||
* the 0x0800:0000 address range.
|
||||
*
|
||||
* The first 0x10000 of flash is reserved for the bootloader.
|
||||
*/
|
||||
|
||||
MEMORY
|
||||
{
|
||||
flash (rx) : ORIGIN = 0x08010000, LENGTH = 928K
|
||||
sram (rwx) : ORIGIN = 0x20000000, LENGTH = 192K
|
||||
}
|
||||
|
||||
OUTPUT_ARCH(arm)
|
||||
|
||||
ENTRY(__start) /* treat __start as the anchor for dead code stripping */
|
||||
EXTERN(_vectors) /* force the vectors to be included in the output */
|
||||
|
||||
/*
|
||||
* Ensure that abort() is present in the final object. The exception handling
|
||||
* code pulled in by libgcc.a requires it (and that code cannot be easily avoided).
|
||||
*/
|
||||
EXTERN(abort)
|
||||
EXTERN(_bootdelay_signature)
|
||||
|
||||
SECTIONS
|
||||
{
|
||||
.text : {
|
||||
_stext = ABSOLUTE(.);
|
||||
*(.vectors)
|
||||
. = ALIGN(8);
|
||||
/*
|
||||
* This section positions the app_descriptor_t used
|
||||
* by the make_can_boot_descriptor.py tool to set
|
||||
* the application image's descriptor so that the
|
||||
* uavcan bootloader has the ability to validate the
|
||||
* image crc, size etc
|
||||
*/
|
||||
KEEP(*(.app_descriptor))
|
||||
*(.text .text.*)
|
||||
*(.fixup)
|
||||
*(.gnu.warning)
|
||||
*(.rodata .rodata.*)
|
||||
*(.gnu.linkonce.t.*)
|
||||
*(.got)
|
||||
*(.gcc_except_table)
|
||||
*(.gnu.linkonce.r.*)
|
||||
_etext = ABSOLUTE(.);
|
||||
} > flash
|
||||
|
||||
/*
|
||||
* Init functions (static constructors and the like)
|
||||
*/
|
||||
.init_section : {
|
||||
_sinit = ABSOLUTE(.);
|
||||
KEEP(*(.init_array .init_array.*))
|
||||
_einit = ABSOLUTE(.);
|
||||
} > flash
|
||||
|
||||
|
||||
.ARM.extab : {
|
||||
*(.ARM.extab*)
|
||||
} > flash
|
||||
|
||||
__exidx_start = ABSOLUTE(.);
|
||||
.ARM.exidx : {
|
||||
*(.ARM.exidx*)
|
||||
} > flash
|
||||
__exidx_end = ABSOLUTE(.);
|
||||
|
||||
_eronly = ABSOLUTE(.);
|
||||
|
||||
.data : {
|
||||
_sdata = ABSOLUTE(.);
|
||||
*(.data .data.*)
|
||||
*(.gnu.linkonce.d.*)
|
||||
CONSTRUCTORS
|
||||
_edata = ABSOLUTE(.);
|
||||
} > sram AT > flash
|
||||
|
||||
.bss : {
|
||||
_sbss = ABSOLUTE(.);
|
||||
*(.bss .bss.*)
|
||||
*(.gnu.linkonce.b.*)
|
||||
*(COMMON)
|
||||
. = ALIGN(4);
|
||||
_ebss = ABSOLUTE(.);
|
||||
} > sram
|
||||
|
||||
/* Stabs debugging sections. */
|
||||
.stab 0 : { *(.stab) }
|
||||
.stabstr 0 : { *(.stabstr) }
|
||||
.stab.excl 0 : { *(.stab.excl) }
|
||||
.stab.exclstr 0 : { *(.stab.exclstr) }
|
||||
.stab.index 0 : { *(.stab.index) }
|
||||
.stab.indexstr 0 : { *(.stab.indexstr) }
|
||||
.comment 0 : { *(.comment) }
|
||||
.debug_abbrev 0 : { *(.debug_abbrev) }
|
||||
.debug_info 0 : { *(.debug_info) }
|
||||
.debug_line 0 : { *(.debug_line) }
|
||||
.debug_pubnames 0 : { *(.debug_pubnames) }
|
||||
.debug_aranges 0 : { *(.debug_aranges) }
|
||||
}
|
||||
@@ -1,68 +0,0 @@
|
||||
############################################################################
|
||||
#
|
||||
# Copyright (c) 2020 PX4 Development Team. All rights reserved.
|
||||
#
|
||||
# Redistribution and use in source and binary forms, with or without
|
||||
# modification, are permitted provided that the following conditions
|
||||
# are met:
|
||||
#
|
||||
# 1. Redistributions of source code must retain the above copyright
|
||||
# notice, this list of conditions and the following disclaimer.
|
||||
# 2. Redistributions in binary form must reproduce the above copyright
|
||||
# notice, this list of conditions and the following disclaimer in
|
||||
# the documentation and/or other materials provided with the
|
||||
# distribution.
|
||||
# 3. Neither the name PX4 nor the names of its contributors may be
|
||||
# used to endorse or promote products derived from this software
|
||||
# without specific prior written permission.
|
||||
#
|
||||
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
# POSSIBILITY OF SUCH DAMAGE.
|
||||
#
|
||||
############################################################################
|
||||
|
||||
if("${PX4_BOARD_LABEL}" STREQUAL "canbootloader")
|
||||
|
||||
add_library(drivers_board
|
||||
boot_config.h
|
||||
boot.c
|
||||
led.c
|
||||
led.h
|
||||
)
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
nuttx_arch
|
||||
nuttx_drivers
|
||||
canbootloader
|
||||
)
|
||||
target_include_directories(drivers_board PRIVATE ${PX4_SOURCE_DIR}/platforms/nuttx/src/canbootloader)
|
||||
|
||||
else()
|
||||
add_library(drivers_board
|
||||
can.c
|
||||
i2c.cpp
|
||||
init.c
|
||||
led.c
|
||||
spi.cpp
|
||||
timer_config.cpp
|
||||
)
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch
|
||||
nuttx_drivers
|
||||
px4_layer
|
||||
)
|
||||
endif()
|
||||
@@ -1,114 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/**
|
||||
* @file board_config.h
|
||||
*
|
||||
* board internal definitions
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include <px4_platform_common/px4_config.h>
|
||||
#include <nuttx/compiler.h>
|
||||
#include <stdint.h>
|
||||
|
||||
/* CAN Silent mode control */
|
||||
#define GPIO_CAN1_SILENT_S0 /* PC14 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTC|GPIO_PIN14)
|
||||
|
||||
/* CAN termination software control */
|
||||
#define GPIO_CAN1_TERMINATION /* PC15 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTC|GPIO_PIN15)
|
||||
#define GPIO_CAN_TERM GPIO_CAN1_TERMINATION
|
||||
|
||||
/* Boot config */
|
||||
#define GPIO_BOOT_CONFIG /* PH1 */ (GPIO_INPUT|GPIO_PULLUP|GPIO_PORTH|GPIO_PIN1|GPIO_EXTI)
|
||||
|
||||
/* ICM42688p FSYNC */
|
||||
#define GPIO_42688P_FSYNC /* PB8 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN8)
|
||||
|
||||
/* LEDs are driven with open drain to support Anode to 5V or 3.3V */
|
||||
#define GPIO_TIM1_CH1 /* PA8 */ (GPIO_TIM1_CH1_1|GPIO_OPENDRAIN|GPIO_SPEED_2MHz)
|
||||
#define GPIO_TIM1_CH2 /* PA9 */ (GPIO_TIM1_CH2_1|GPIO_OPENDRAIN|GPIO_SPEED_2MHz)
|
||||
#define GPIO_TIM1_CH3 /* PA10 */ (GPIO_TIM1_CH3_1|GPIO_OPENDRAIN|GPIO_SPEED_2MHz)
|
||||
|
||||
/* PWM Outputs */
|
||||
#define DIRECT_PWM_OUTPUT_CHANNELS 6 // Actually 8
|
||||
|
||||
#define GPIO_TIM2_CH1_RESET /* PA0 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTA|GPIO_PIN0)
|
||||
#define GPIO_TIM2_CH2_RESET /* PA1 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTA|GPIO_PIN1)
|
||||
#define GPIO_TIM2_CH3_RESET /* PB10 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN10)
|
||||
#define GPIO_TIM3_CH1_RESET /* PB4 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN4)
|
||||
#define GPIO_TIM3_CH2_RESET /* PB5 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN5)
|
||||
#define GPIO_TIM3_CH3_RESET /* PB0 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN0)
|
||||
#define GPIO_TIM3_CH4_RESET /* PB1 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN1)
|
||||
#define GPIO_TIM4_CH4_RESET /* PB7 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN7)
|
||||
|
||||
#define GPIO_I2C1_SCL_RESET /* PB6 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN6)
|
||||
#define GPIO_I2C1_SDA_RESET /* PB9 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_SPEED_2MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN9)
|
||||
|
||||
#define GPIO_USART1_RX_GPIO /* PB3 */ (GPIO_INPUT|GPIO_PULLUP|GPIO_SPEED_50MHz|GPIO_PORTB|GPIO_PIN3)
|
||||
#define GPIO_USART1_TX_GPIO /* PA15 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_PULLUP|GPIO_SPEED_50MHz|GPIO_PORTA|GPIO_PIN15)
|
||||
|
||||
#define GPIO_USART2_RX_GPIO /* PA3 */ (GPIO_INPUT|GPIO_PULLUP|GPIO_SPEED_50MHz|GPIO_PORTA|GPIO_PIN3)
|
||||
#define GPIO_USART2_TX_GPIO /* PA2 */ (GPIO_OUTPUT|GPIO_PUSHPULL|GPIO_PULLUP|GPIO_SPEED_50MHz|GPIO_PORTA|GPIO_PIN2)
|
||||
|
||||
#define FLASH_BASED_PARAMS
|
||||
|
||||
/* High-resolution timer */
|
||||
#define HRT_TIMER 8 /* use timer 8 for the HRT */
|
||||
#define HRT_TIMER_CHANNEL 1 /* use capture/compare channel 1 */
|
||||
|
||||
#define PX4_GPIO_INIT_LIST { \
|
||||
GPIO_CAN1_SILENT_S0, \
|
||||
GPIO_CAN1_TERMINATION, \
|
||||
GPIO_42688P_FSYNC, \
|
||||
GPIO_CAN1_TX, \
|
||||
GPIO_CAN1_RX, \
|
||||
GPIO_I2C1_SCL_RESET, \
|
||||
GPIO_I2C1_SDA_RESET, \
|
||||
}
|
||||
|
||||
__BEGIN_DECLS
|
||||
|
||||
#define BOARD_HAS_N_S_RGB_LED 1
|
||||
#define BOARD_MAX_LEDS BOARD_HAS_N_S_RGB_LED
|
||||
|
||||
#ifndef __ASSEMBLY__
|
||||
|
||||
extern void stm32_spiinitialize(void);
|
||||
|
||||
#include <px4_platform_common/board_common.h>
|
||||
|
||||
#endif /* __ASSEMBLY__ */
|
||||
|
||||
__END_DECLS
|
||||
@@ -1,188 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
* Author: Ben Dyer <ben_dyer@mac.com>
|
||||
* Pavel Kirienko <pavel.kirienko@zubax.com>
|
||||
* David Sidrane <david_s5@nscdg.com>
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/****************************************************************************
|
||||
* Included Files
|
||||
****************************************************************************/
|
||||
|
||||
#include <px4_config.h>
|
||||
#include <stdint.h>
|
||||
#include "boot_config.h"
|
||||
#include "board.h"
|
||||
|
||||
#include <debug.h>
|
||||
#include <string.h>
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include <nuttx/board.h>
|
||||
#include "led.h"
|
||||
|
||||
/************************************************************************************
|
||||
* Name: stm32_boardinitialize
|
||||
*
|
||||
* Description:
|
||||
* All STM32 architectures must provide the following entry point. This entry point
|
||||
* is called early in the initialization -- after all memory has been configured
|
||||
* and mapped but before any devices have been initialized.
|
||||
*
|
||||
************************************************************************************/
|
||||
|
||||
__EXPORT void stm32_boardinitialize(void)
|
||||
{
|
||||
putreg32(getreg32(STM32_RCC_APB1ENR) | RCC_APB1ENR_CAN1EN, STM32_RCC_APB1ENR);
|
||||
stm32_configgpio(GPIO_CAN1_RX);
|
||||
stm32_configgpio(GPIO_CAN1_TX);
|
||||
stm32_configgpio(GPIO_CAN1_SILENT_S0);
|
||||
stm32_configgpio(GPIO_CAN1_TERMINATION);
|
||||
putreg32(getreg32(STM32_RCC_APB1RSTR) | RCC_APB1RSTR_CAN1RST, STM32_RCC_APB1RSTR);
|
||||
putreg32(getreg32(STM32_RCC_APB1RSTR) & ~RCC_APB1RSTR_CAN1RST, STM32_RCC_APB1RSTR);
|
||||
|
||||
#if defined(OPT_WAIT_FOR_GETNODEINFO_JUMPER_GPIO)
|
||||
stm32_configgpio(GPIO_GETNODEINFO_JUMPER);
|
||||
#endif
|
||||
|
||||
}
|
||||
|
||||
/************************************************************************************
|
||||
* Name: board_deinitialize
|
||||
*
|
||||
* Description:
|
||||
* This function is called by the bootloader code prior to booting
|
||||
* the application. Is should place the HW into an benign initialized state.
|
||||
*
|
||||
************************************************************************************/
|
||||
|
||||
void board_deinitialize(void)
|
||||
{
|
||||
putreg32(getreg32(STM32_RCC_APB1RSTR) | RCC_APB1RSTR_CAN1RST, STM32_RCC_APB1RSTR);
|
||||
}
|
||||
|
||||
/****************************************************************************
|
||||
* Name: board_get_product_name
|
||||
*
|
||||
* Description:
|
||||
* Called to retrieve the product name. The returned value is a assumed
|
||||
* to be written to a pascal style string that will be length prefixed
|
||||
* and not null terminated
|
||||
*
|
||||
* Input Parameters:
|
||||
* product_name - A pointer to a buffer to write the name.
|
||||
* maxlen - The maximum number of charter that can be written
|
||||
*
|
||||
* Returned Value:
|
||||
* The length of characters written to the buffer.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
uint8_t board_get_product_name(uint8_t *product_name, size_t maxlen)
|
||||
{
|
||||
DEBUGASSERT(maxlen > UAVCAN_STRLEN(HW_UAVCAN_NAME));
|
||||
memcpy(product_name, HW_UAVCAN_NAME, UAVCAN_STRLEN(HW_UAVCAN_NAME));
|
||||
return UAVCAN_STRLEN(HW_UAVCAN_NAME);
|
||||
}
|
||||
|
||||
/****************************************************************************
|
||||
* Name: board_get_hardware_version
|
||||
*
|
||||
* Description:
|
||||
* Called to retrieve the hardware version information. The function
|
||||
* will first initialize the the callers struct to all zeros.
|
||||
*
|
||||
* Input Parameters:
|
||||
* hw_version - A pointer to a uavcan_hardwareversion_t.
|
||||
*
|
||||
* Returned Value:
|
||||
* Length of the unique_id
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
size_t board_get_hardware_version(uavcan_HardwareVersion_t *hw_version)
|
||||
{
|
||||
memset(hw_version, 0, sizeof(uavcan_HardwareVersion_t));
|
||||
|
||||
hw_version->major = HW_VERSION_MAJOR;
|
||||
hw_version->minor = HW_VERSION_MINOR;
|
||||
|
||||
return board_get_mfguid(*(mfguid_t *) hw_version->unique_id);
|
||||
}
|
||||
|
||||
/****************************************************************************
|
||||
* Name: board_indicate
|
||||
*
|
||||
* Description:
|
||||
* Provides User feedback to indicate the state of the bootloader
|
||||
* on board specific hardware.
|
||||
*
|
||||
* Input Parameters:
|
||||
* indication - A member of the uiindication_t
|
||||
*
|
||||
* Returned Value:
|
||||
* None
|
||||
*
|
||||
****************************************************************************/
|
||||
#define led(n, code, r , g , b, h) {.red = (r),.green = (g), .blue = (b),.hz = (h)}
|
||||
|
||||
typedef begin_packed_struct struct led_t {
|
||||
uint8_t red;
|
||||
uint8_t green;
|
||||
uint8_t blue;
|
||||
uint8_t hz;
|
||||
} end_packed_struct led_t;
|
||||
|
||||
static const led_t i2l[] = {
|
||||
|
||||
led(0, off, 0, 0, 0, 0),
|
||||
led(1, reset, 128, 128, 128, 30),
|
||||
led(2, autobaud_start, 0, 128, 0, 1),
|
||||
led(3, autobaud_end, 0, 128, 0, 2),
|
||||
led(4, allocation_start, 0, 0, 64, 2),
|
||||
led(5, allocation_end, 0, 128, 64, 3),
|
||||
led(6, fw_update_start, 32, 128, 64, 3),
|
||||
led(7, fw_update_erase_fail, 32, 128, 32, 3),
|
||||
led(8, fw_update_invalid_response, 64, 0, 0, 1),
|
||||
led(9, fw_update_timeout, 64, 0, 0, 2),
|
||||
led(a, fw_update_invalid_crc, 64, 0, 0, 4),
|
||||
led(b, jump_to_app, 0, 128, 0, 10),
|
||||
|
||||
};
|
||||
|
||||
void board_indicate(uiindication_t indication)
|
||||
{
|
||||
rgb_led(i2l[indication].red,
|
||||
i2l[indication].green,
|
||||
i2l[indication].blue,
|
||||
i2l[indication].hz);
|
||||
}
|
||||
@@ -1,130 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/*
|
||||
* @file boot_config.h
|
||||
*
|
||||
* bootloader definitions that configures the behavior and options
|
||||
* of the Boot loader
|
||||
* This file is relies on the parent folder's boot_config.h file and defines
|
||||
* different usages of the hardware for bootloading
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
/************************************************************************************
|
||||
* Included Files
|
||||
************************************************************************************/
|
||||
|
||||
/* Bring in the board_config.h definitions
|
||||
* todo:make this be pulled in from a targed's build
|
||||
* files in nuttx*/
|
||||
|
||||
#include "board_config.h"
|
||||
#include "uavcan.h"
|
||||
#include <nuttx/compiler.h>
|
||||
|
||||
#include <stdint.h>
|
||||
|
||||
#include <stm32_flash.h>
|
||||
|
||||
/****************************************************************************
|
||||
* Pre-processor Definitions
|
||||
****************************************************************************/
|
||||
|
||||
#define OPT_PREFERRED_NODE_ID ANY_NODE_ID
|
||||
|
||||
//todo:wrap OPT_x in in ifdefs for command line definitions
|
||||
#define OPT_TBOOT_MS 5000
|
||||
#define OPT_NODE_STATUS_RATE_MS 800
|
||||
#define OPT_NODE_INFO_RATE_MS 50
|
||||
#define OPT_BL_NUMBER_TIMERS 7
|
||||
|
||||
/*
|
||||
* This Option set is set to 1 ensure a provider of firmware has an
|
||||
* opportunity update the node's firmware.
|
||||
* This Option is the default policy and can be overridden by
|
||||
* a jumper
|
||||
* When this Policy is set, the node will ignore tboot and
|
||||
* wait indefinitely for a GetNodeInfo request before booting.
|
||||
*
|
||||
* OPT_WAIT_FOR_GETNODEINFO_JUMPER_GPIO_INVERT is used to allow
|
||||
* the polarity of the jumper to be True Active
|
||||
*
|
||||
* wait OPT_WAIT_FOR_GETNODEINFO OPT_WAIT_FOR_GETNODEINFO_JUMPER_GPIO
|
||||
* Jumper
|
||||
* yes 1 0 x
|
||||
* yes 1 1 Active
|
||||
* no 1 1 Not Active
|
||||
* no 0 0 X
|
||||
* yes 0 1 Active
|
||||
* no 0 1 Not Active
|
||||
*
|
||||
*/
|
||||
#define OPT_WAIT_FOR_GETNODEINFO 0
|
||||
#define OPT_WAIT_FOR_GETNODEINFO_JUMPER_GPIO 1
|
||||
#define OPT_WAIT_FOR_GETNODEINFO_JUMPER_GPIO_INVERT 0
|
||||
|
||||
#define OPT_ENABLE_WD 1
|
||||
|
||||
#define OPT_RESTART_TIMEOUT_MS 20000
|
||||
|
||||
/* Reserved for the Booloader */
|
||||
#define OPT_BOOTLOADER_SIZE_IN_K (1024*64)
|
||||
|
||||
/* Reserved for the application out of the total
|
||||
* system flash minus the BOOTLOADER_SIZE_IN_K
|
||||
*/
|
||||
#define OPT_APPLICATION_RESERVER_IN_K 0
|
||||
|
||||
#define OPT_APPLICATION_IMAGE_OFFSET OPT_BOOTLOADER_SIZE_IN_K
|
||||
#define OPT_APPLICATION_IMAGE_LENGTH (FLASH_SIZE-(OPT_BOOTLOADER_SIZE_IN_K+OPT_APPLICATION_RESERVER_IN_K))
|
||||
|
||||
|
||||
#define FLASH_BASE STM32_FLASH_BASE
|
||||
#define FLASH_SIZE STM32_FLASH_SIZE
|
||||
|
||||
#define APPLICATION_LOAD_ADDRESS (FLASH_BASE + OPT_APPLICATION_IMAGE_OFFSET)
|
||||
#define APPLICATION_SIZE (FLASH_SIZE-OPT_APPLICATION_IMAGE_OFFSET)
|
||||
#define APPLICATION_LAST_8BIT_ADDRRESS ((uint8_t *)((APPLICATION_LOAD_ADDRESS+APPLICATION_SIZE)-sizeof(uint8_t)))
|
||||
#define APPLICATION_LAST_32BIT_ADDRRESS ((uint32_t *)((APPLICATION_LOAD_ADDRESS+APPLICATION_SIZE)-sizeof(uint32_t)))
|
||||
#define APPLICATION_LAST_64BIT_ADDRRESS ((uint64_t *)((APPLICATION_LOAD_ADDRESS+APPLICATION_SIZE)-sizeof(uint64_t)))
|
||||
|
||||
/* If this board uses big flash that have large sectors */
|
||||
|
||||
#define OPT_USE_YIELD
|
||||
|
||||
/* Bootloader Option*****************************************************************
|
||||
*
|
||||
*/
|
||||
#define GPIO_GETNODEINFO_JUMPER (GPIO_BOOT_CONFIG & ~GPIO_EXTI)
|
||||
@@ -1,130 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (C) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/**
|
||||
* @file can.c
|
||||
*
|
||||
* Board-specific CAN functions.
|
||||
*/
|
||||
|
||||
/************************************************************************************
|
||||
* Included Files
|
||||
************************************************************************************/
|
||||
|
||||
#include <px4_platform_common/px4_config.h>
|
||||
|
||||
#include <errno.h>
|
||||
#include <debug.h>
|
||||
|
||||
#include <nuttx/can/can.h>
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
#include "board_config.h"
|
||||
|
||||
#ifdef CONFIG_CAN
|
||||
|
||||
/************************************************************************************
|
||||
* Pre-processor Definitions
|
||||
************************************************************************************/
|
||||
/* Configuration ********************************************************************/
|
||||
|
||||
#if defined(CONFIG_STM32_CAN1) && defined(CONFIG_STM32_CAN2)
|
||||
# warning "Both CAN1 and CAN2 are enabled. Assuming only CAN1."
|
||||
# undef CONFIG_STM32_CAN2
|
||||
#endif
|
||||
|
||||
#ifdef CONFIG_STM32_CAN1
|
||||
# define CAN_PORT 1
|
||||
#else
|
||||
# define CAN_PORT 2
|
||||
#endif
|
||||
|
||||
/************************************************************************************
|
||||
* Private Functions
|
||||
************************************************************************************/
|
||||
|
||||
/************************************************************************************
|
||||
* Public Functions
|
||||
************************************************************************************/
|
||||
int can_devinit(void);
|
||||
|
||||
/************************************************************************************
|
||||
* Name: can_devinit
|
||||
*
|
||||
* Description:
|
||||
* All STM32 architectures must provide the following interface to work with
|
||||
* examples/can.
|
||||
*
|
||||
************************************************************************************/
|
||||
|
||||
int can_devinit(void)
|
||||
{
|
||||
static bool initialized = false;
|
||||
struct can_dev_s *can;
|
||||
int ret;
|
||||
|
||||
/* Check if we have already initialized */
|
||||
|
||||
if (!initialized) {
|
||||
/* Call stm32_caninitialize() to get an instance of the CAN interface */
|
||||
|
||||
can = stm32_caninitialize(CAN_PORT);
|
||||
|
||||
if (can == NULL) {
|
||||
canerr("ERROR: Failed to get CAN interface\n");
|
||||
return -ENODEV;
|
||||
}
|
||||
|
||||
/* Register the CAN driver at "/dev/can0" */
|
||||
|
||||
ret = can_register("/dev/can0", can);
|
||||
|
||||
if (ret < 0) {
|
||||
canerr("ERROR: can_register failed: %d\n", ret);
|
||||
return ret;
|
||||
}
|
||||
|
||||
/* Now we are initialized */
|
||||
|
||||
initialized = true;
|
||||
}
|
||||
|
||||
return OK;
|
||||
}
|
||||
|
||||
#endif
|
||||
@@ -1,38 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (C) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
#include <px4_arch/i2c_hw_description.h>
|
||||
|
||||
constexpr px4_i2c_bus_t px4_i2c_buses[I2C_BUS_MAX_BUS_ITEMS] = {
|
||||
initI2CBusExternal(1),
|
||||
};
|
||||
@@ -1,188 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/**
|
||||
* @file init.c
|
||||
*
|
||||
* board specific early startup code. This file implements the
|
||||
* board_app_initialize() function that is called early by nsh during startup.
|
||||
*
|
||||
* Code here is run before the rcS script is invoked; it should start required
|
||||
* subsystems and perform board-specific initialization.
|
||||
*/
|
||||
|
||||
#include <px4_platform_common/px4_config.h>
|
||||
#include <px4_platform_common/tasks.h>
|
||||
|
||||
#include <stdbool.h>
|
||||
#include <stdio.h>
|
||||
#include <string.h>
|
||||
#include <debug.h>
|
||||
#include <errno.h>
|
||||
#include <syslog.h>
|
||||
|
||||
#include <nuttx/board.h>
|
||||
|
||||
#include <stm32.h>
|
||||
#include "board_config.h"
|
||||
#include "led.h"
|
||||
#include <stm32_uart.h>
|
||||
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include <drivers/drv_hrt.h>
|
||||
#include <drivers/drv_board_led.h>
|
||||
#include <drivers/drv_watchdog.h>
|
||||
|
||||
#include <systemlib/px4_macros.h>
|
||||
|
||||
#include <px4_platform_common/init.h>
|
||||
#include <px4_platform/gpio.h>
|
||||
|
||||
#include <drivers/drv_pwm_output.h>
|
||||
#include <px4_arch/io_timer.h>
|
||||
|
||||
# if defined(FLASH_BASED_PARAMS)
|
||||
# include <parameters/flashparams/flashfs.h>
|
||||
#endif
|
||||
|
||||
/************************************************************************************
|
||||
* Name: board_on_reset
|
||||
*
|
||||
* Description:
|
||||
* Optionally provided function called on entry to board_system_reset
|
||||
* It should perform any house keeping prior to the rest.
|
||||
*
|
||||
* status - 1 if resetting to boot loader
|
||||
* 0 if just resetting
|
||||
*
|
||||
************************************************************************************/
|
||||
__EXPORT void board_on_reset(int status)
|
||||
{
|
||||
// Configure the GPIO pins to outputs and keep them low.
|
||||
for (int i = 0; i < DIRECT_PWM_OUTPUT_CHANNELS; ++i) {
|
||||
px4_arch_configgpio(io_timer_channel_get_gpio_output(i));
|
||||
}
|
||||
|
||||
/*
|
||||
* On resets invoked from system (not boot) insure we establish a low
|
||||
* output state (discharge the pins) on PWM pins before they become inputs.
|
||||
*/
|
||||
|
||||
if (status >= 0) {
|
||||
up_mdelay(400);
|
||||
}
|
||||
}
|
||||
|
||||
/************************************************************************************
|
||||
* Name: stm32_boardinitialize
|
||||
*
|
||||
* Description:
|
||||
* All STM32 architectures must provide the following entry point. This entry point
|
||||
* is called early in the initialization -- after all memory has been configured
|
||||
* and mapped but before any devices have been initialized.
|
||||
*
|
||||
************************************************************************************/
|
||||
|
||||
__EXPORT void stm32_boardinitialize(void)
|
||||
{
|
||||
// Reset all PWM to Low outputs.
|
||||
board_on_reset(-1);
|
||||
|
||||
watchdog_init();
|
||||
|
||||
/* configure pins */
|
||||
const uint32_t gpio[] = PX4_GPIO_INIT_LIST;
|
||||
px4_gpio_init(gpio, arraySize(gpio));
|
||||
|
||||
// Configure SPI all interfaces GPIO & enable power.
|
||||
stm32_spiinitialize();
|
||||
}
|
||||
|
||||
/****************************************************************************
|
||||
* Name: board_app_initialize
|
||||
*
|
||||
* Description:
|
||||
* Perform application specific initialization. This function is never
|
||||
* called directly from application code, but only indirectly via the
|
||||
* (non-standard) boardctl() interface using the command BOARDIOC_INIT.
|
||||
*
|
||||
* Input Parameters:
|
||||
* arg - The boardctl() argument is passed to the board_app_initialize()
|
||||
* implementation without modification. The argument has no
|
||||
* meaning to NuttX; the meaning of the argument is a contract
|
||||
* between the board-specific initalization logic and the the
|
||||
* matching application logic. The value cold be such things as a
|
||||
* mode enumeration value, a set of DIP switch switch settings, a
|
||||
* pointer to configuration data read from a file or serial FLASH,
|
||||
* or whatever you would like to do with it. Every implementation
|
||||
* should accept zero/NULL as a default configuration.
|
||||
*
|
||||
* Returned Value:
|
||||
* Zero (OK) is returned on success; a negated errno value is returned on
|
||||
* any failure to indicate the nature of the failure.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
__EXPORT int board_app_initialize(uintptr_t arg)
|
||||
{
|
||||
px4_platform_init();
|
||||
|
||||
#if defined(SERIAL_HAVE_RXDMA)
|
||||
// set up the serial DMA polling at 1ms intervals for received bytes that have not triggered a DMA event.
|
||||
static struct hrt_call serial_dma_call;
|
||||
hrt_call_every(&serial_dma_call, 1000, 1000, (hrt_callout)stm32_serial_dma_poll, NULL);
|
||||
#endif
|
||||
|
||||
#if defined(FLASH_BASED_PARAMS)
|
||||
static sector_descriptor_t params_sector_map[] = {
|
||||
{2, 16 * 1024, 0x08008000},
|
||||
{3, 16 * 1024, 0x0800C000},
|
||||
{0, 0, 0},
|
||||
};
|
||||
|
||||
/* Initialize the flashfs layer to use heap allocated memory */
|
||||
int result = parameter_flashfs_init(params_sector_map, NULL, 0);
|
||||
|
||||
if (result != OK) {
|
||||
syslog(LOG_ERR, "[boot] FAILED to init params in FLASH %d\n", result);
|
||||
}
|
||||
|
||||
#endif // FLASH_BASED_PARAMS
|
||||
|
||||
/* Configure the HW based on the manifest */
|
||||
|
||||
px4_platform_configure();
|
||||
|
||||
return OK;
|
||||
}
|
||||
@@ -1,124 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
/**
|
||||
* @file led.c
|
||||
*
|
||||
* LED backend.
|
||||
*/
|
||||
|
||||
#include <px4_platform_common/px4_config.h>
|
||||
|
||||
#include <stdbool.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "stm32_gpio.h"
|
||||
#include "board_config.h"
|
||||
|
||||
#include <nuttx/board.h>
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "led.h"
|
||||
|
||||
#define TMR_BASE STM32_TIM1_BASE
|
||||
#define TMR_FREQUENCY STM32_APB2_TIM1_CLKIN
|
||||
#define TMR_REG(o) (TMR_BASE+(o))
|
||||
|
||||
void rgb_led(int r, int g, int b, int freqs)
|
||||
{
|
||||
|
||||
long fosc = TMR_FREQUENCY;
|
||||
long prescale = 2048;
|
||||
long p1s = fosc / prescale;
|
||||
long p0p5s = p1s / 2;
|
||||
uint16_t val;
|
||||
static bool once = 0;
|
||||
|
||||
if (!once) {
|
||||
once = 1;
|
||||
|
||||
/* Enabel Clock to Block */
|
||||
modifyreg32(STM32_RCC_APB2ENR, 0, RCC_APB2ENR_TIM1EN);
|
||||
|
||||
/* Reload */
|
||||
|
||||
val = getreg16(TMR_REG(STM32_BTIM_EGR_OFFSET));
|
||||
val |= ATIM_EGR_UG;
|
||||
putreg16(val, TMR_REG(STM32_BTIM_EGR_OFFSET));
|
||||
|
||||
/* Set Prescaler STM32_TIM_SETCLOCK */
|
||||
|
||||
putreg16(prescale, TMR_REG(STM32_BTIM_PSC_OFFSET));
|
||||
|
||||
/* Enable STM32_TIM_SETMODE*/
|
||||
|
||||
putreg16(ATIM_CR1_CEN | ATIM_CR1_ARPE, TMR_REG(STM32_BTIM_CR1_OFFSET));
|
||||
|
||||
|
||||
putreg16((ATIM_CCMR_MODE_PWM1 << ATIM_CCMR1_OC1M_SHIFT) | ATIM_CCMR1_OC1PE |
|
||||
(ATIM_CCMR_MODE_PWM1 << ATIM_CCMR1_OC2M_SHIFT) | ATIM_CCMR1_OC2PE, TMR_REG(STM32_GTIM_CCMR1_OFFSET));
|
||||
putreg16((ATIM_CCMR_MODE_PWM1 << ATIM_CCMR2_OC3M_SHIFT) | ATIM_CCMR2_OC3PE, TMR_REG(STM32_GTIM_CCMR2_OFFSET));
|
||||
putreg16(ATIM_CCER_CC3E | ATIM_CCER_CC3P |
|
||||
ATIM_CCER_CC2E | ATIM_CCER_CC2P |
|
||||
ATIM_CCER_CC1E | ATIM_CCER_CC1P, TMR_REG(STM32_GTIM_CCER_OFFSET));
|
||||
|
||||
|
||||
stm32_configgpio(GPIO_TIM1_CH1);
|
||||
stm32_configgpio(GPIO_TIM1_CH2);
|
||||
stm32_configgpio(GPIO_TIM1_CH3);
|
||||
|
||||
/* master output enable = on */
|
||||
putreg16(ATIM_BDTR_MOE, (TMR_REG(STM32_ATIM_BDTR_OFFSET)));
|
||||
}
|
||||
|
||||
long p = freqs == 0 ? p1s : p1s / freqs;
|
||||
putreg32(p, TMR_REG(STM32_BTIM_ARR_OFFSET));
|
||||
|
||||
p = freqs == 0 ? p1s + 1 : p0p5s / freqs;
|
||||
|
||||
putreg32((r * p) / 255, TMR_REG(STM32_GTIM_CCR1_OFFSET));
|
||||
putreg32((g * p) / 255, TMR_REG(STM32_GTIM_CCR2_OFFSET));
|
||||
putreg32((b * p) / 255, TMR_REG(STM32_GTIM_CCR3_OFFSET));
|
||||
|
||||
val = getreg16(TMR_REG(STM32_BTIM_CR1_OFFSET));
|
||||
|
||||
if (freqs == 0) {
|
||||
val &= ~ATIM_CR1_CEN;
|
||||
|
||||
} else {
|
||||
val |= ATIM_CR1_CEN;
|
||||
}
|
||||
|
||||
putreg16(val, TMR_REG(STM32_BTIM_CR1_OFFSET));
|
||||
|
||||
}
|
||||
@@ -1,37 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (C) 2015 PX4 Development Team. All rights reserved.
|
||||
* Author: David Sidrane<david_s5@nscdg.com>
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
__BEGIN_DECLS
|
||||
void rgb_led(int r, int g, int b, int freqs);
|
||||
__END_DECLS
|
||||
@@ -1,54 +0,0 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (C) 2012 PX4 Development Team. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
* are met:
|
||||
*
|
||||
* 1. Redistributions of source code must retain the above copyright
|
||||
* notice, this list of conditions and the following disclaimer.
|
||||
* 2. Redistributions in binary form must reproduce the above copyright
|
||||
* notice, this list of conditions and the following disclaimer in
|
||||
* the documentation and/or other materials provided with the
|
||||
* distribution.
|
||||
* 3. Neither the name PX4 nor the names of its contributors may be
|
||||
* used to endorse or promote products derived from this software
|
||||
* without specific prior written permission.
|
||||
*
|
||||
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
* POSSIBILITY OF SUCH DAMAGE.
|
||||
*
|
||||
****************************************************************************/
|
||||
|
||||
#include <px4_arch/io_timer_hw_description.h>
|
||||
|
||||
constexpr io_timers_t io_timers[MAX_IO_TIMERS] = {
|
||||
initIOTimer(Timer::Timer2),
|
||||
initIOTimer(Timer::Timer3),
|
||||
//initIOTimer(Timer::Timer4),
|
||||
};
|
||||
|
||||
constexpr timer_io_channels_t timer_io_channels[MAX_TIMER_IO_CHANNELS] = {
|
||||
initIOTimerChannel(io_timers, {Timer::Timer2, Timer::Channel1}, {GPIO::PortA, GPIO::Pin0}),
|
||||
initIOTimerChannel(io_timers, {Timer::Timer2, Timer::Channel2}, {GPIO::PortA, GPIO::Pin1}),
|
||||
initIOTimerChannel(io_timers, {Timer::Timer2, Timer::Channel3}, {GPIO::PortB, GPIO::Pin10}),
|
||||
initIOTimerChannel(io_timers, {Timer::Timer3, Timer::Channel1}, {GPIO::PortB, GPIO::Pin4}),
|
||||
initIOTimerChannel(io_timers, {Timer::Timer3, Timer::Channel2}, {GPIO::PortB, GPIO::Pin5}),
|
||||
initIOTimerChannel(io_timers, {Timer::Timer3, Timer::Channel3}, {GPIO::PortB, GPIO::Pin0}),
|
||||
//initIOTimerChannel(io_timers, {Timer::Timer3, Timer::Channel4}, {GPIO::PortB, GPIO::Pin1}),
|
||||
//initIOTimerChannel(io_timers, {Timer::Timer4, Timer::Channel2}, {GPIO::PortB, GPIO::Pin7}),
|
||||
};
|
||||
|
||||
constexpr io_timers_channel_mapping_t io_timers_channel_mapping =
|
||||
initIOTimerChannelMapping(io_timers, timer_io_channels);
|
||||
@@ -1,17 +0,0 @@
|
||||
# UAVCAN boot loadable Module ID
|
||||
set(uavcanblid_sw_version_major 0)
|
||||
set(uavcanblid_sw_version_minor 1)
|
||||
add_definitions(
|
||||
-DAPP_VERSION_MAJOR=${uavcanblid_sw_version_major}
|
||||
-DAPP_VERSION_MINOR=${uavcanblid_sw_version_minor}
|
||||
)
|
||||
|
||||
set(uavcanblid_hw_version_major 0)
|
||||
set(uavcanblid_hw_version_minor 83)
|
||||
set(uavcanblid_name "\"org.ark.cannode\"")
|
||||
|
||||
add_definitions(
|
||||
-DHW_UAVCAN_NAME=${uavcanblid_name}
|
||||
-DHW_VERSION_MAJOR=${uavcanblid_hw_version_major}
|
||||
-DHW_VERSION_MINOR=${uavcanblid_hw_version_minor}
|
||||
)
|
||||
@@ -118,6 +118,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -133,6 +134,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -235,5 +237,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -55,7 +55,7 @@
|
||||
#include <uORB/uORB.h>
|
||||
#include <uORB/Publication.hpp>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include "board_config.h"
|
||||
#include <stm32_pwr.h>
|
||||
|
||||
|
||||
@@ -141,6 +141,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAM_SIZE=245760
|
||||
@@ -155,6 +156,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -267,5 +269,5 @@ CONFIG_USART6_RXBUFSIZE=600
|
||||
CONFIG_USART6_RXDMA=y
|
||||
CONFIG_USART6_TXBUFSIZE=1500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -109,6 +109,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAM_SIZE=196608
|
||||
@@ -121,6 +122,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -185,5 +187,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -44,7 +44,7 @@
|
||||
#include <systemlib/px4_macros.h>
|
||||
#include <nuttx/mmcsd.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <chip.h>
|
||||
#include <stm32_gpio.h>
|
||||
#include "board_config.h"
|
||||
|
||||
@@ -51,7 +51,7 @@
|
||||
#include <nuttx/usb/usbdev.h>
|
||||
#include <nuttx/usb/usbdev_trace.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <stm32.h>
|
||||
#include "board_config.h"
|
||||
|
||||
|
||||
@@ -108,6 +108,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAM_SIZE=196608
|
||||
@@ -120,6 +121,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -184,5 +186,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -44,7 +44,7 @@
|
||||
#include <systemlib/px4_macros.h>
|
||||
#include <nuttx/mmcsd.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <chip.h>
|
||||
#include <stm32_gpio.h>
|
||||
#include "board_config.h"
|
||||
|
||||
@@ -51,7 +51,7 @@
|
||||
#include <nuttx/usb/usbdev.h>
|
||||
#include <nuttx/usb/usbdev_trace.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <stm32.h>
|
||||
#include "board_config.h"
|
||||
|
||||
|
||||
@@ -59,4 +59,4 @@ CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_STM32_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -91,6 +91,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -104,6 +105,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -152,5 +154,5 @@ CONFIG_USART2_BAUD=57600
|
||||
CONFIG_USART2_RXBUFSIZE=600
|
||||
CONFIG_USART2_TXBUFSIZE=1100
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2624
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2624
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -89,5 +89,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="bootloader_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="bootloader_main"
|
||||
|
||||
@@ -118,6 +118,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -133,6 +134,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -238,6 +240,6 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
CONFIG_WATCHDOG=y
|
||||
|
||||
@@ -89,5 +89,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="bootloader_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="bootloader_main"
|
||||
|
||||
@@ -117,6 +117,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -132,6 +133,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -237,6 +239,6 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
CONFIG_WATCHDOG=y
|
||||
|
||||
Binary file not shown.
@@ -89,5 +89,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="bootloader_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="bootloader_main"
|
||||
|
||||
@@ -119,6 +119,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -134,6 +135,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -228,6 +230,6 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
CONFIG_WATCHDOG=y
|
||||
|
||||
@@ -0,0 +1,247 @@
|
||||
#
|
||||
# This file is autogenerated: PLEASE DO NOT EDIT IT.
|
||||
#
|
||||
# You can use "make menuconfig" to make any modifications to the installed .config file.
|
||||
# You can then do "make savedefconfig" to generate a new defconfig file that includes your
|
||||
# modifications.
|
||||
#
|
||||
# CONFIG_DISABLE_ENVIRON is not set
|
||||
# CONFIG_DISABLE_PSEUDOFS_OPERATIONS is not set
|
||||
# CONFIG_DISABLE_PTHREAD is not set
|
||||
# CONFIG_MMCSD_HAVE_CARDDETECT is not set
|
||||
# CONFIG_MMCSD_HAVE_WRITEPROTECT is not set
|
||||
# CONFIG_MMCSD_MMCSUPPORT is not set
|
||||
# CONFIG_MMCSD_SPI is not set
|
||||
# CONFIG_NET_ETHERNET is not set
|
||||
# CONFIG_NET_IPv4 is not set
|
||||
# CONFIG_NSH_DISABLEBG is not set
|
||||
# CONFIG_NSH_DISABLESCRIPT is not set
|
||||
# CONFIG_NSH_DISABLE_DF is not set
|
||||
# CONFIG_NSH_DISABLE_EXEC is not set
|
||||
# CONFIG_NSH_DISABLE_EXIT is not set
|
||||
# CONFIG_NSH_DISABLE_GET is not set
|
||||
# CONFIG_NSH_DISABLE_ITEF is not set
|
||||
# CONFIG_NSH_DISABLE_LOOPS is not set
|
||||
# CONFIG_NSH_DISABLE_MKFATFS is not set
|
||||
# CONFIG_NSH_DISABLE_REBOOT is not set
|
||||
# CONFIG_NSH_DISABLE_SEMICOLON is not set
|
||||
# CONFIG_NSH_DISABLE_SHUTDOWN is not set
|
||||
# CONFIG_NSH_DISABLE_TIME is not set
|
||||
CONFIG_ARCH="arm"
|
||||
CONFIG_ARCH_BOARD_CUSTOM=y
|
||||
CONFIG_ARCH_BOARD_CUSTOM_DIR="../../../../boards/cubepilot/cubeorange/nuttx-config"
|
||||
CONFIG_ARCH_BOARD_CUSTOM_DIR_RELPATH=y
|
||||
CONFIG_ARCH_BOARD_CUSTOM_NAME="px4"
|
||||
CONFIG_ARCH_CHIP="stm32h7"
|
||||
CONFIG_ARCH_CHIP_STM32H743ZI=y
|
||||
CONFIG_ARCH_CHIP_STM32H7=y
|
||||
CONFIG_ARCH_INTERRUPTSTACK=512
|
||||
CONFIG_ARCH_STACKDUMP=y
|
||||
CONFIG_ARMV7M_BASEPRI_WAR=y
|
||||
CONFIG_ARMV7M_DCACHE=y
|
||||
CONFIG_ARMV7M_DTCM=y
|
||||
CONFIG_ARMV7M_ICACHE=y
|
||||
CONFIG_ARMV7M_MEMCPY=y
|
||||
CONFIG_ARMV7M_USEBASEPRI=y
|
||||
CONFIG_ARM_MPU_EARLY_RESET=y
|
||||
CONFIG_BOARDCTL_RESET=y
|
||||
CONFIG_BOARD_CRASHDUMP=y
|
||||
CONFIG_BOARD_LOOPSPERMSEC=79954
|
||||
CONFIG_BOARD_RESET_ON_ASSERT=2
|
||||
CONFIG_BUILTIN=y
|
||||
CONFIG_C99_BOOL8=y
|
||||
CONFIG_CANUTILS_CANDUMP=y
|
||||
CONFIG_CANUTILS_CANSEND=y
|
||||
CONFIG_CDCACM=y
|
||||
CONFIG_CDCACM_IFLOWCONTROL=y
|
||||
CONFIG_CDCACM_PRODUCTID=0x1016
|
||||
CONFIG_CDCACM_PRODUCTSTR="CubeOrange"
|
||||
CONFIG_CDCACM_RXBUFSIZE=600
|
||||
CONFIG_CDCACM_TXBUFSIZE=12000
|
||||
CONFIG_CDCACM_VENDORID=0x2DAE
|
||||
CONFIG_CDCACM_VENDORSTR="CubePilot"
|
||||
CONFIG_DEBUG_FULLOPT=y
|
||||
CONFIG_DEBUG_HARDFAULT_ALERT=y
|
||||
CONFIG_DEBUG_SYMBOLS=y
|
||||
CONFIG_DEFAULT_SMALL=y
|
||||
CONFIG_DEV_FIFO_SIZE=0
|
||||
CONFIG_DEV_PIPE_MAXSIZE=1024
|
||||
CONFIG_DEV_PIPE_SIZE=70
|
||||
CONFIG_EXAMPLES_CALIB_UDELAY=y
|
||||
CONFIG_EXPERIMENTAL=y
|
||||
CONFIG_FAT_DMAMEMORY=y
|
||||
CONFIG_FAT_LCNAMES=y
|
||||
CONFIG_FAT_LFN=y
|
||||
CONFIG_FAT_LFN_ALIAS_HASH=y
|
||||
CONFIG_FDCLONE_STDIO=y
|
||||
CONFIG_FS_BINFS=y
|
||||
CONFIG_FS_CROMFS=y
|
||||
CONFIG_FS_FAT=y
|
||||
CONFIG_FS_FATTIME=y
|
||||
CONFIG_FS_PROCFS=y
|
||||
CONFIG_FS_PROCFS_INCLUDE_PROGMEM=y
|
||||
CONFIG_FS_PROCFS_MAX_TASKS=64
|
||||
CONFIG_FS_PROCFS_REGISTER=y
|
||||
CONFIG_FS_ROMFS=y
|
||||
CONFIG_GRAN=y
|
||||
CONFIG_GRAN_INTR=y
|
||||
CONFIG_HAVE_CXX=y
|
||||
CONFIG_HAVE_CXXINITIALIZE=y
|
||||
CONFIG_I2C=y
|
||||
CONFIG_I2C_RESET=y
|
||||
CONFIG_IDLETHREAD_STACKSIZE=750
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_LIBC_LONG_LONG=y
|
||||
CONFIG_LIBC_STRERROR=y
|
||||
CONFIG_MEMSET_64BIT=y
|
||||
CONFIG_MEMSET_OPTSPEED=y
|
||||
CONFIG_MMCSD=y
|
||||
CONFIG_MMCSD_SDIO=y
|
||||
CONFIG_MMCSD_SDIOWAIT_WRCOMPLETE=y
|
||||
CONFIG_MM_REGIONS=4
|
||||
CONFIG_MTD=y
|
||||
CONFIG_MTD_BYTE_WRITE=y
|
||||
CONFIG_MTD_PARTITION=y
|
||||
CONFIG_MTD_PROGMEM=y
|
||||
CONFIG_MTD_RAMTRON=y
|
||||
CONFIG_NAME_MAX=40
|
||||
CONFIG_NET=y
|
||||
CONFIG_NETDEV_CAN_BITRATE_IOCTL=y
|
||||
CONFIG_NETDEV_IFINDEX=y
|
||||
CONFIG_NETDEV_PHY_IOCTL=y
|
||||
CONFIG_NET_CAN=y
|
||||
CONFIG_NET_CAN_RAW_TX_DEADLINE=y
|
||||
CONFIG_NET_CAN_SOCK_OPTS=y
|
||||
CONFIG_NET_TIMESTAMP=y
|
||||
CONFIG_NSH_ARCHINIT=y
|
||||
CONFIG_NSH_ARGCAT=y
|
||||
CONFIG_NSH_BUILTIN_APPS=y
|
||||
CONFIG_NSH_CMDPARMS=y
|
||||
CONFIG_NSH_CROMFSETC=y
|
||||
CONFIG_NSH_DISABLE_TELNETD=y
|
||||
CONFIG_NSH_LINELEN=128
|
||||
CONFIG_NSH_MAXARGUMENTS=15
|
||||
CONFIG_NSH_NESTDEPTH=8
|
||||
CONFIG_NSH_QUOTE=y
|
||||
CONFIG_NSH_ROMFSETC=y
|
||||
CONFIG_NSH_ROMFSSECTSIZE=128
|
||||
CONFIG_NSH_STRERROR=y
|
||||
CONFIG_NSH_VARS=y
|
||||
CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
CONFIG_RAM_SIZE=245760
|
||||
CONFIG_RAM_START=0x20010000
|
||||
CONFIG_RAW_BINARY=y
|
||||
CONFIG_READLINE_CMD_HISTORY=y
|
||||
CONFIG_READLINE_TABCOMPLETION=y
|
||||
CONFIG_RTC_DATETIME=y
|
||||
CONFIG_SCHED_ATEXIT=y
|
||||
CONFIG_SCHED_HPWORK=y
|
||||
CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
CONFIG_SCHED_WAITPID=y
|
||||
CONFIG_SDMMC1_SDIO_PULLUP=y
|
||||
CONFIG_SEM_NNESTPRIO=8
|
||||
CONFIG_SEM_PREALLOCHOLDERS=0
|
||||
CONFIG_SERIAL_IFLOWCONTROL_WATERMARKS=y
|
||||
CONFIG_SERIAL_TERMIOS=y
|
||||
CONFIG_SIG_DEFAULT=y
|
||||
CONFIG_SIG_SIGALRM_ACTION=y
|
||||
CONFIG_SIG_SIGUSR1_ACTION=y
|
||||
CONFIG_SIG_SIGUSR2_ACTION=y
|
||||
CONFIG_SIG_SIGWORK=4
|
||||
CONFIG_STACK_COLORATION=y
|
||||
CONFIG_START_DAY=30
|
||||
CONFIG_START_MONTH=11
|
||||
CONFIG_STDIO_BUFFER_SIZE=256
|
||||
CONFIG_STM32H7_ADC1=y
|
||||
CONFIG_STM32H7_ADC3=y
|
||||
CONFIG_STM32H7_BBSRAM=y
|
||||
CONFIG_STM32H7_BBSRAM_FILES=5
|
||||
CONFIG_STM32H7_BKPSRAM=y
|
||||
CONFIG_STM32H7_DMA1=y
|
||||
CONFIG_STM32H7_DMA2=y
|
||||
CONFIG_STM32H7_DMACAPABLE=y
|
||||
CONFIG_STM32H7_FDCAN1=y
|
||||
CONFIG_STM32H7_FDCAN2=y
|
||||
CONFIG_STM32H7_FLOWCONTROL_BROKEN=y
|
||||
CONFIG_STM32H7_I2C1=y
|
||||
CONFIG_STM32H7_I2C2=y
|
||||
CONFIG_STM32H7_I2C_DYNTIMEO=y
|
||||
CONFIG_STM32H7_I2C_DYNTIMEO_STARTSTOP=10
|
||||
CONFIG_STM32H7_OTGFS=y
|
||||
CONFIG_STM32H7_PROGMEM=y
|
||||
CONFIG_STM32H7_RTC=y
|
||||
CONFIG_STM32H7_RTC_HSECLOCK=y
|
||||
CONFIG_STM32H7_RTC_MAGIC_REG=1
|
||||
CONFIG_STM32H7_SAVE_CRASHDUMP=y
|
||||
CONFIG_STM32H7_SDMMC1=y
|
||||
CONFIG_STM32H7_SERIALBRK_BSDCOMPAT=y
|
||||
CONFIG_STM32H7_SERIAL_DISABLE_REORDERING=y
|
||||
CONFIG_STM32H7_SPI1=y
|
||||
CONFIG_STM32H7_SPI1_DMA=y
|
||||
CONFIG_STM32H7_SPI1_DMA_BUFFER=1024
|
||||
CONFIG_STM32H7_SPI2=y
|
||||
CONFIG_STM32H7_SPI4=y
|
||||
CONFIG_STM32H7_SPI4_DMA=y
|
||||
CONFIG_STM32H7_SPI4_DMA_BUFFER=1024
|
||||
CONFIG_STM32H7_SPI_DMA=y
|
||||
CONFIG_STM32H7_TIM1=y
|
||||
CONFIG_STM32H7_TIM3=y
|
||||
CONFIG_STM32H7_TIM4=y
|
||||
CONFIG_STM32H7_UART4=y
|
||||
CONFIG_STM32H7_UART7=y
|
||||
CONFIG_STM32H7_UART8=y
|
||||
CONFIG_STM32H7_USART2=y
|
||||
CONFIG_STM32H7_USART3=y
|
||||
CONFIG_STM32H7_USART6=y
|
||||
CONFIG_STM32H7_USART_BREAKS=y
|
||||
CONFIG_STM32H7_USART_INVERT=y
|
||||
CONFIG_STM32H7_USART_SINGLEWIRE=y
|
||||
CONFIG_STM32H7_USART_SWAP=y
|
||||
CONFIG_SYSTEM_CDCACM=y
|
||||
CONFIG_SYSTEM_NSH=y
|
||||
CONFIG_TASK_NAME_SIZE=24
|
||||
CONFIG_TTY_SIGINT=y
|
||||
CONFIG_TTY_SIGTSTP=y
|
||||
CONFIG_UART4_BAUD=57600
|
||||
CONFIG_UART4_RXBUFSIZE=600
|
||||
CONFIG_UART4_TXBUFSIZE=1500
|
||||
CONFIG_UART7_BAUD=57600
|
||||
CONFIG_UART7_RXBUFSIZE=600
|
||||
CONFIG_UART7_SERIAL_CONSOLE=y
|
||||
CONFIG_UART7_TXBUFSIZE=1500
|
||||
CONFIG_UART8_BAUD=57600
|
||||
CONFIG_UART8_RXBUFSIZE=600
|
||||
CONFIG_UART8_TXBUFSIZE=1500
|
||||
CONFIG_USART2_BAUD=57600
|
||||
CONFIG_USART2_IFLOWCONTROL=y
|
||||
CONFIG_USART2_OFLOWCONTROL=y
|
||||
CONFIG_USART2_RXBUFSIZE=600
|
||||
CONFIG_USART2_TXBUFSIZE=1500
|
||||
CONFIG_USART3_BAUD=57600
|
||||
CONFIG_USART3_IFLOWCONTROL=y
|
||||
CONFIG_USART3_OFLOWCONTROL=y
|
||||
CONFIG_USART3_RXBUFSIZE=600
|
||||
CONFIG_USART3_TXBUFSIZE=3000
|
||||
CONFIG_USART6_BAUD=57600
|
||||
CONFIG_USART6_RXBUFSIZE=600
|
||||
CONFIG_USART6_TXBUFSIZE=1500
|
||||
CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_WATCHDOG=y
|
||||
@@ -117,6 +117,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -132,6 +133,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -226,6 +228,6 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
CONFIG_WATCHDOG=y
|
||||
|
||||
@@ -0,0 +1,22 @@
|
||||
CONFIG_DRIVERS_ADC_ADS1115=n
|
||||
CONFIG_DRIVERS_IMU_ANALOG_DEVICES_ADIS16448=n
|
||||
CONFIG_DRIVERS_IRLOCK=n
|
||||
CONFIG_DRIVERS_PCA9685=n
|
||||
CONFIG_DRIVERS_PCA9685_PWM_OUT=n
|
||||
CONFIG_DRIVERS_RPM=n
|
||||
CONFIG_DRIVERS_UAVCAN=n
|
||||
CONFIG_MODULES_ATTITUDE_ESTIMATOR_Q=n
|
||||
CONFIG_MODULES_LOCAL_POSITION_ESTIMATOR=n
|
||||
CONFIG_MODULES_ROVER_POS_CONTROL=n
|
||||
CONFIG_MODULES_TEMPERATURE_COMPENSATION=n
|
||||
CONFIG_DRIVERS_UAVCAN_V1=y
|
||||
CONFIG_UAVCAN_V1_BMS_SUBSCRIBER=y
|
||||
CONFIG_UAVCAN_V1_ESC_CONTROLLER=y
|
||||
CONFIG_UAVCAN_V1_ESC_SUBSCRIBER=y
|
||||
CONFIG_UAVCAN_V1_GNSS_PUBLISHER=y
|
||||
CONFIG_UAVCAN_V1_GNSS_SUBSCRIBER_0=y
|
||||
CONFIG_UAVCAN_V1_GNSS_SUBSCRIBER_1=y
|
||||
CONFIG_UAVCAN_V1_READINESS_PUBLISHER=y
|
||||
CONFIG_UAVCAN_V1_UORB_ACTUATOR_OUTPUTS_PUBLISHER=y
|
||||
CONFIG_UAVCAN_V1_UORB_SENSOR_GPS_PUBLISHER=y
|
||||
CONFIG_UAVCAN_V1_UORB_SENSOR_GPS_SUBSCRIBER=y
|
||||
Binary file not shown.
@@ -119,6 +119,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -134,6 +135,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -234,5 +236,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -61,5 +61,5 @@ CONFIG_USART3_RXBUFSIZE=64
|
||||
CONFIG_USART3_RXDMA=y
|
||||
CONFIG_USART3_TXBUFSIZE=64
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=1100
|
||||
CONFIG_USER_ENTRYPOINT="user_start"
|
||||
CONFIG_INIT_STACKSIZE=1100
|
||||
CONFIG_INIT_ENTRYPOINT="user_start"
|
||||
|
||||
@@ -70,19 +70,29 @@
|
||||
|
||||
/* LEDS **********************************************************************/
|
||||
|
||||
#define GPIO_LED_AMBER (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN15) // IO-LED_AMBER
|
||||
#define GPIO_LED_SAFETY (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN13) // IO-LED_SAFETY
|
||||
#define GPIO_LED_GREEN (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTA|GPIO_PIN11) // IO-LED_POWER_BREATHING
|
||||
#define GPIO_LED1 (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN14)
|
||||
#define GPIO_LED2 (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN15)
|
||||
#define GPIO_LED3 (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN13)
|
||||
#define GPIO_LED4 (GPIO_OUTPUT|GPIO_CNF_OUTOD|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTA|GPIO_PIN11)
|
||||
|
||||
#define LED_AMBER(on_true) stm32_gpiowrite(GPIO_LED_AMBER, !(on_true))
|
||||
#define LED_SAFETY(on_true) stm32_gpiowrite(GPIO_LED_SAFETY, !(on_true))
|
||||
#define LED_GREEN(on_true) stm32_gpiowrite(GPIO_LED_GREEN, (on_true))
|
||||
#define GPIO_HEATER_OFF (GPIO_OUTPUT|GPIO_CNF_OUTPP|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTB|GPIO_PIN14)
|
||||
|
||||
#define GPIO_PC14 (GPIO_INPUT|GPIO_CNF_INFLOAT|GPIO_MODE_INPUT|GPIO_PORTC|GPIO_PIN14)
|
||||
#define GPIO_PC15 (GPIO_INPUT|GPIO_CNF_INFLOAT|GPIO_MODE_INPUT|GPIO_PORTC|GPIO_PIN15)
|
||||
|
||||
/* HEATER */
|
||||
#define GPIO_HEATER_OUTPUT /* PB14 */ (GPIO_OUTPUT|GPIO_CNF_OUTPP|GPIO_MODE_50MHz|GPIO_OUTPUT_CLEAR|GPIO_PORTB|GPIO_PIN14)
|
||||
#define HEATER_OUTPUT_EN(on_true) stm32_gpiowrite(GPIO_HEATER_OUTPUT, (on_true))
|
||||
/* PixHawk 1:
|
||||
* PC14 Floating
|
||||
* PC15 Floating
|
||||
*
|
||||
* PixHawk 2:
|
||||
* PC14 3.3v
|
||||
* PC15 GND
|
||||
*/
|
||||
|
||||
#define GPIO_SENSE_PC14_DN (GPIO_INPUT|GPIO_CNF_INPULLDWN|GPIO_MODE_INPUT|GPIO_PORTC|GPIO_PIN14)
|
||||
#define GPIO_SENSE_PC15_UP (GPIO_INPUT|GPIO_CNF_INPULLUP|GPIO_MODE_INPUT|GPIO_PORTC|GPIO_PIN15)
|
||||
# define SENSE_PH1 0b10 /* Floating pulled as set */
|
||||
# define SENSE_PH2 0b01 /* Driven as tied */
|
||||
|
||||
#define GPIO_USART1_RX_SPEKTRUM (GPIO_OUTPUT|GPIO_CNF_OUTPP|GPIO_MODE_50MHz|GPIO_OUTPUT_SET|GPIO_PORTA|GPIO_PIN10)
|
||||
|
||||
@@ -140,6 +150,18 @@
|
||||
#define HRT_PPM_CHANNEL 1 /* use capture/compare channel 1 PA8 */
|
||||
#define GPIO_PPM_IN (GPIO_ALT|GPIO_CNF_INPULLUP|GPIO_PORTA|GPIO_PIN8)
|
||||
|
||||
/* LED definitions ******************************************************************/
|
||||
/* PX4 has two LEDs that we will encode as: */
|
||||
|
||||
#define LED_STARTED 0 /* LED? */
|
||||
#define LED_HEAPALLOCATE 1 /* LED? */
|
||||
#define LED_IRQSENABLED 2 /* LED? + LED? */
|
||||
#define LED_STACKCREATED 3 /* LED? */
|
||||
#define LED_INIRQ 4 /* LED? + LED? */
|
||||
#define LED_SIGNAL 5 /* LED? + LED? */
|
||||
#define LED_ASSERTION 6 /* LED? + LED? + LED? */
|
||||
#define LED_PANIC 7 /* N/C + N/C + N/C + LED? */
|
||||
|
||||
#define BOARD_NUM_IO_TIMERS 3
|
||||
|
||||
#include <px4_platform_common/board_common.h>
|
||||
|
||||
@@ -32,7 +32,7 @@
|
||||
****************************************************************************/
|
||||
|
||||
/**
|
||||
* @file init.c
|
||||
* @file px4iov2_init.c
|
||||
*
|
||||
* PX4FMU-specific early startup code. This file implements the
|
||||
* stm32_boardinitialize() function that is called during cpu startup.
|
||||
@@ -84,14 +84,38 @@
|
||||
|
||||
__EXPORT void stm32_boardinitialize(void)
|
||||
{
|
||||
|
||||
/* configure GPIOs */
|
||||
|
||||
stm32_configgpio(GPIO_HEATER_OUTPUT);
|
||||
/* Set up for sensing HW */
|
||||
|
||||
stm32_configgpio(GPIO_SENSE_PC14_DN);
|
||||
stm32_configgpio(GPIO_SENSE_PC15_UP);
|
||||
|
||||
/* LEDS - default to off */
|
||||
stm32_configgpio(GPIO_LED_AMBER);
|
||||
stm32_configgpio(GPIO_LED_SAFETY);
|
||||
stm32_configgpio(GPIO_LED_GREEN);
|
||||
stm32_configgpio(GPIO_LED1);
|
||||
stm32_configgpio(GPIO_LED2);
|
||||
stm32_configgpio(GPIO_LED3);
|
||||
stm32_configgpio(GPIO_LED4);
|
||||
|
||||
/* PixHawk 1:
|
||||
* PC14 Floating
|
||||
* PC15 Floating
|
||||
*
|
||||
* PixHawk 2:
|
||||
* PC14 3.3v
|
||||
* PC15 GND
|
||||
*/
|
||||
|
||||
uint8_t sense = stm32_gpioread(GPIO_SENSE_PC15_UP) << 1 | stm32_gpioread(GPIO_SENSE_PC14_DN);
|
||||
|
||||
if (sense == SENSE_PH2) {
|
||||
stm32_configgpio(GPIO_HEATER_OFF);
|
||||
}
|
||||
|
||||
stm32_configgpio(GPIO_PC14);
|
||||
stm32_configgpio(GPIO_PC15);
|
||||
|
||||
|
||||
stm32_configgpio(GPIO_BTN_SAFETY);
|
||||
|
||||
@@ -139,7 +163,4 @@ __EXPORT void stm32_boardinitialize(void)
|
||||
|
||||
stm32_gpiowrite(GPIO_PWM8, true);
|
||||
stm32_configgpio(GPIO_PWM8);
|
||||
|
||||
/* disable heater */
|
||||
HEATER_OUTPUT_EN(false);
|
||||
}
|
||||
|
||||
@@ -64,4 +64,4 @@ CONFIG_STM32F7_PROGMEM=y
|
||||
CONFIG_STM32F7_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -103,6 +103,7 @@ CONFIG_OTG_ID_GPIO_DISABLE=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -118,6 +119,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -171,5 +173,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2624
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=2624
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -48,7 +48,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "chip.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -51,7 +51,7 @@
|
||||
#include <nuttx/usb/usbdev.h>
|
||||
#include <nuttx/usb/usbdev_trace.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <chip.h>
|
||||
#include <stm32_gpio.h>
|
||||
#include <stm32_otg.h>
|
||||
|
||||
@@ -58,4 +58,4 @@ CONFIG_STM32_NOEXT_VECTORS=y
|
||||
CONFIG_STM32_TIM8=y
|
||||
CONFIG_TASK_NAME_SIZE=0
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
|
||||
@@ -91,6 +91,7 @@ CONFIG_NSH_VARS=y
|
||||
CONFIG_PIPES=y
|
||||
CONFIG_PREALLOC_TIMERS=50
|
||||
CONFIG_PRIORITY_INHERITANCE=y
|
||||
CONFIG_DISABLE_PTHREAD=n
|
||||
CONFIG_PTHREAD_MUTEX_ROBUST=y
|
||||
CONFIG_PTHREAD_STACK_MIN=512
|
||||
CONFIG_RAMTRON_SETSPEED=y
|
||||
@@ -104,6 +105,7 @@ CONFIG_SCHED_HPWORKPRIORITY=249
|
||||
CONFIG_SCHED_HPWORKSTACKSIZE=1280
|
||||
CONFIG_SCHED_INSTRUMENTATION=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_EXTERNAL=y
|
||||
CONFIG_SCHED_INSTRUMENTATION_SWITCH=y
|
||||
CONFIG_SCHED_LPWORK=y
|
||||
CONFIG_SCHED_LPWORKPRIORITY=50
|
||||
CONFIG_SCHED_LPWORKSTACKSIZE=1632
|
||||
@@ -159,5 +161,5 @@ CONFIG_USART2_RXDMA=y
|
||||
CONFIG_USART2_SERIAL_CONSOLE=y
|
||||
CONFIG_USART2_TXBUFSIZE=2500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=4096
|
||||
CONFIG_USER_ENTRYPOINT="nsh_main"
|
||||
CONFIG_INIT_STACKSIZE=4096
|
||||
CONFIG_INIT_ENTRYPOINT="nsh_main"
|
||||
|
||||
@@ -50,7 +50,7 @@
|
||||
#include <arch/board/board.h>
|
||||
|
||||
#include "chip.h"
|
||||
#include "arm_arch.h"
|
||||
#include "arm_internal.h"
|
||||
|
||||
#include "stm32.h"
|
||||
#include "stm32_can.h"
|
||||
|
||||
@@ -51,7 +51,7 @@
|
||||
#include <nuttx/usb/usbdev.h>
|
||||
#include <nuttx/usb/usbdev_trace.h>
|
||||
|
||||
#include <arm_arch.h>
|
||||
#include <arm_internal.h>
|
||||
#include <stm32.h>
|
||||
#include "board_config.h"
|
||||
|
||||
|
||||
Binary file not shown.
@@ -90,5 +90,5 @@ CONFIG_USBDEV=y
|
||||
CONFIG_USBDEV_BUSPOWERED=y
|
||||
CONFIG_USBDEV_MAXPOWER=500
|
||||
CONFIG_USEC_PER_TICK=1000
|
||||
CONFIG_USERMAIN_STACKSIZE=2944
|
||||
CONFIG_USER_ENTRYPOINT="bootloader_main"
|
||||
CONFIG_INIT_STACKSIZE=2944
|
||||
CONFIG_INIT_ENTRYPOINT="bootloader_main"
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user