mirror of
https://gitee.com/mirrors_PX4/PX4-Autopilot.git
synced 2026-06-06 13:10:05 +08:00
Compare commits
13 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
2eb2b2a17f | ||
|
|
bba589ece2 | ||
|
|
ad827fc806 | ||
|
|
606cfba407 | ||
|
|
598e7e65b7 | ||
|
|
c83e1eb175 | ||
|
|
ba9b23c2d1 | ||
|
|
38fc86cf3b | ||
|
|
a3d0ca9800 | ||
|
|
34b9dc880f | ||
|
|
04e08c5edb | ||
|
|
2668510295 | ||
|
|
5388f7f911 |
@@ -20,7 +20,7 @@ A clear and concise description of what you expected to happen.
|
||||
|
||||
## Log Files and Screenshots
|
||||
*Always* provide a link to the flight log file:
|
||||
- Download the flight log file from the vehicle ([tutorial](https://docs.px4.io/main/en/getting_started/flight_reporting.html)).
|
||||
- Download the flight log file from the vehicle ([tutorial](https://docs.px4.io/master/en/getting_started/flight_reporting.html)).
|
||||
- Upload the log to the [PX4 Flight Review](http://logs.px4.io/)
|
||||
- Share the link to the log (Copy and paste the URL of the log)
|
||||
|
||||
|
||||
@@ -0,0 +1,14 @@
|
||||
name: docker-dev
|
||||
on: [push, pull_request]
|
||||
jobs:
|
||||
changes:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- id: file_changes
|
||||
uses: trilom/file-changes-action@v1.2.3
|
||||
- name: test
|
||||
run: |
|
||||
echo '${{ steps.file_changes.outputs.files}}'
|
||||
echo '${{ steps.file_changes.outputs.files_modified}}'
|
||||
echo '${{ steps.file_changes.outputs.files_added}}'
|
||||
echo '${{ steps.file_changes.outputs.files_removed}}'
|
||||
+2
-2
@@ -8,7 +8,7 @@ First [fork and clone](https://help.github.com/articles/fork-a-repo) the project
|
||||
|
||||
### Create a feature branch
|
||||
|
||||
*Always* branch off main for new features.
|
||||
*Always* branch off master for new features.
|
||||
|
||||
```
|
||||
git checkout -b mydescriptivebranchname
|
||||
@@ -16,7 +16,7 @@ git checkout -b mydescriptivebranchname
|
||||
|
||||
### Edit and build the code
|
||||
|
||||
The [developer guide](https://docs.px4.io/main/en/development/development.html) explains how to set up the development environment on Mac OS, Linux or Windows. Please take note of our [coding style](https://docs.px4.io/main/en/contribute/code.html) when editing files.
|
||||
The [developer guide](http://dev.px4.io/) explains how to set up the development environment on Mac OS, Linux or Windows. Please take note of our [coding style](https://dev.px4.io/master/en/contribute/code.html) when editing files.
|
||||
|
||||
### Commit your changes
|
||||
|
||||
|
||||
Vendored
+16
-23
@@ -7,8 +7,7 @@ pipeline {
|
||||
stage('Analysis') {
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -205,21 +204,20 @@ pipeline {
|
||||
unstash 'msg_documentation'
|
||||
unstash 'uorb_graph'
|
||||
withCredentials([usernamePassword(credentialsId: 'px4buildbot_github_personal_token', passwordVariable: 'GIT_PASS', usernameVariable: 'GIT_USER')]) {
|
||||
sh('git clone https://${GIT_USER}:${GIT_PASS}@github.com/PX4/PX4-user_guide.git')
|
||||
sh('cp airframes.md PX4-user_guide/en/airframes/airframe_reference.md')
|
||||
sh('cp parameters.md PX4-user_guide/en/advanced_config/parameter_reference.md')
|
||||
sh('cp -R modules/*.md PX4-user_guide/en/modules/')
|
||||
sh('cp -R graph_*.json PX4-user_guide/.vuepress/public/en/middleware/')
|
||||
sh('cp -R msg_docs/*.md PX4-user_guide/en/msg_docs/')
|
||||
sh('cd PX4-user_guide; git status; git add .; git commit -a -m "Update PX4 Firmware metadata `date`" || true')
|
||||
sh('cd PX4-user_guide; git push origin main || true')
|
||||
sh('rm -rf PX4-user_guide')
|
||||
sh('git clone https://${GIT_USER}:${GIT_PASS}@github.com/PX4/px4_user_guide.git')
|
||||
sh('cp airframes.md px4_user_guide/en/airframes/airframe_reference.md')
|
||||
sh('cp parameters.md px4_user_guide/en/advanced_config/parameter_reference.md')
|
||||
sh('cp -R modules/*.md px4_user_guide/en/modules/')
|
||||
sh('cp -R graph_*.json px4_user_guide/.vuepress/public/en/middleware/')
|
||||
sh('cp -R msg_docs/*.md px4_user_guide/en/msg_docs/')
|
||||
sh('cd px4_user_guide; git status; git add .; git commit -a -m "Update PX4 Firmware metadata `date`" || true')
|
||||
sh('cd px4_user_guide; git push origin master || true')
|
||||
sh('rm -rf px4_user_guide')
|
||||
}
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -247,8 +245,7 @@ pipeline {
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -281,8 +278,7 @@ pipeline {
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -311,8 +307,7 @@ pipeline {
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -355,8 +350,7 @@ pipeline {
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
@@ -379,8 +373,7 @@ pipeline {
|
||||
}
|
||||
when {
|
||||
anyOf {
|
||||
branch 'main'
|
||||
branch 'master' // should be removed, but in case there is something going on...
|
||||
branch 'master'
|
||||
branch 'pr-jenkins' // for testing
|
||||
}
|
||||
}
|
||||
|
||||
@@ -10,8 +10,8 @@ This repository holds the [PX4](http://px4.io) flight control solution for drone
|
||||
|
||||
PX4 is highly portable, OS-independent and supports Linux, NuttX and MacOS out of the box.
|
||||
|
||||
* Official Website: http://px4.io (License: BSD 3-clause, [LICENSE](https://github.com/PX4/PX4-Autopilot/blob/main/LICENSE))
|
||||
* [Supported airframes](https://docs.px4.io/main/en/airframes/airframe_reference.html) ([portfolio](https://px4.io/ecosystem/commercial-systems/)):
|
||||
* Official Website: http://px4.io (License: BSD 3-clause, [LICENSE](https://github.com/PX4/PX4-Autopilot/blob/master/LICENSE))
|
||||
* [Supported airframes](https://docs.px4.io/main/en/airframes/airframe_reference.html) ([portfolio](http://px4.io/#airframes)):
|
||||
* [Multicopters](https://docs.px4.io/main/en/frames_multicopter/)
|
||||
* [Fixed wing](https://docs.px4.io/main/en/frames_plane/)
|
||||
* [VTOL](https://docs.px4.io/main/en/frames_vtol/)
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
#
|
||||
# @name Phantom FPV Flying Wing
|
||||
#
|
||||
# @url https://docs.px4.io/main/en/frames_plane/wing_wing_z84.html
|
||||
# @url https://docs.px4.io/master/en/frames_plane/wing_wing_z84.html
|
||||
#
|
||||
# @type Flying Wing
|
||||
# @class Plane
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
#
|
||||
# @name Wing Wing (aka Z-84) Flying Wing
|
||||
#
|
||||
# @url https://docs.px4.io/main/en/frames_plane/wing_wing_z84.html
|
||||
# @url https://docs.px4.io/master/en/frames_plane/wing_wing_z84.html
|
||||
#
|
||||
# @type Flying Wing
|
||||
# @class Plane
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
#!/bin/sh
|
||||
#
|
||||
# @name Spedix S250AQ
|
||||
# @url https://docs.px4.io/main/en/frames_multicopter/spedix_s250_pixracer.html
|
||||
# @url https://docs.px4.io/master/en/frames_multicopter/spedix_s250_pixracer.html
|
||||
#
|
||||
# @type Quadrotor asymmetric
|
||||
# @class Copter
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
#
|
||||
# @name HolyBro QAV250
|
||||
#
|
||||
# @url https://docs.px4.io/main/en/frames_multicopter/holybro_qav250_pixhawk4_mini.html
|
||||
# @url https://docs.px4.io/master/en/frames_multicopter/holybro_qav250_pixhawk4_mini.html
|
||||
#
|
||||
# @type Quadrotor x
|
||||
# @class Copter
|
||||
|
||||
Executable
+21
@@ -0,0 +1,21 @@
|
||||
#!/bin/bash
|
||||
|
||||
if [[ -z "${DOCKER_TAG}" ]]; then
|
||||
# the default tag for docker images
|
||||
# follows the pattern below, and we recommend
|
||||
# that any images pushed to the registry continue
|
||||
# to use the pattern for consistency
|
||||
TAG_NAME="`date +"%Y-%m-%d"`"
|
||||
else
|
||||
TAG_NAME="${DOCKER_TAG}"
|
||||
fi
|
||||
|
||||
PX4_DOCKER_REPO="ghcr.io/px4/px4-dev:$TAG_NAME"
|
||||
PWD=$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )
|
||||
SRC_DIR=$PWD/../
|
||||
|
||||
echo "[docker_build.sh]: Building [$PX4_DOCKER_REPO]"
|
||||
|
||||
docker build \
|
||||
-t ${PX4_DOCKER_REPO} \
|
||||
-f Tools/setup/Dockerfile "${SRC_DIR}"
|
||||
+19
-57
@@ -1,67 +1,29 @@
|
||||
#! /bin/bash
|
||||
#!/bin/bash
|
||||
|
||||
if [ -z ${PX4_DOCKER_REPO+x} ]; then
|
||||
echo "guessing PX4_DOCKER_REPO based on input";
|
||||
if [[ $@ =~ .*px4_fmu.* ]]; then
|
||||
# nuttx-px4fmu-v{1,2,3,4,5}
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-nuttx-focal:2021-09-08"
|
||||
elif [[ $@ =~ .*navio2.* ]] || [[ $@ =~ .*raspberry.* ]] || [[ $@ =~ .*beaglebone.* ]] || [[ $@ =~ .*pilotpi.default ]]; then
|
||||
# beaglebone_blue_default, emlid_navio2_default, px4_raspberrypi_default, scumaker_pilotpi_default
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-armhf:2021-08-18"
|
||||
elif [[ $@ =~ .*pilotpi.arm64 ]]; then
|
||||
# scumaker_pilotpi_arm64
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-aarch64:latest"
|
||||
elif [[ $@ =~ .*navio2.* ]] || [[ $@ =~ .*raspberry.* ]] || [[ $@ =~ .*bebop.* ]]; then
|
||||
# posix_rpi_cross, posix_bebop_default
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-armhf:2021-08-18"
|
||||
elif [[ $@ =~ .*clang.* ]] || [[ $@ =~ .*scan-build.* ]]; then
|
||||
# clang tools
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-clang:2021-02-04"
|
||||
elif [[ $@ =~ .*tests* ]]; then
|
||||
# run all tests with simulation
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-simulation-bionic:2021-12-11"
|
||||
fi
|
||||
if [[ -z "${DOCKER_TAG}" ]]; then
|
||||
# The default tag name should be hardcoded
|
||||
# to whatever we are currently using in CI on this branch
|
||||
TAG_NAME="2022-08-16"
|
||||
else
|
||||
echo "PX4_DOCKER_REPO is set to '$PX4_DOCKER_REPO'";
|
||||
TAG_NAME="${DOCKER_TAG}"
|
||||
fi
|
||||
|
||||
# otherwise default to nuttx
|
||||
if [ -z ${PX4_DOCKER_REPO+x} ]; then
|
||||
PX4_DOCKER_REPO="px4io/px4-dev-nuttx-focal:2021-09-08"
|
||||
fi
|
||||
PX4_DOCKER_REPO="ghcr.io/px4/px4-dev:$TAG_NAME"
|
||||
|
||||
# docker hygiene
|
||||
|
||||
#Delete all stopped containers (including data-only containers)
|
||||
#docker rm $(docker ps -a -q)
|
||||
|
||||
#Delete all 'untagged/dangling' (<none>) images
|
||||
#docker rmi $(docker images -q -f dangling=true)
|
||||
|
||||
echo "PX4_DOCKER_REPO: $PX4_DOCKER_REPO";
|
||||
echo "[docker_run.sh]: Running '$PX4_DOCKER_REPO'"
|
||||
|
||||
PWD=$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )
|
||||
SRC_DIR=$PWD/../
|
||||
|
||||
CCACHE_DIR=${HOME}/.ccache
|
||||
mkdir -p "${CCACHE_DIR}"
|
||||
|
||||
docker run -it --rm -w "${SRC_DIR}" \
|
||||
--env=AWS_ACCESS_KEY_ID \
|
||||
--env=AWS_SECRET_ACCESS_KEY \
|
||||
--env=BRANCH_NAME \
|
||||
--env=CCACHE_DIR="${CCACHE_DIR}" \
|
||||
--env=CI \
|
||||
--env=CODECOV_TOKEN \
|
||||
--env=COVERALLS_REPO_TOKEN \
|
||||
--env=LOCAL_USER_ID="$(id -u)" \
|
||||
--env=PX4_ASAN \
|
||||
--env=PX4_MSAN \
|
||||
--env=PX4_TSAN \
|
||||
--env=PX4_UBSAN \
|
||||
--env=TRAVIS_BRANCH \
|
||||
--env=TRAVIS_BUILD_ID \
|
||||
--publish 14556:14556/udp \
|
||||
--volume=${CCACHE_DIR}:${CCACHE_DIR}:rw \
|
||||
--volume=${SRC_DIR}:${SRC_DIR}:rw \
|
||||
${PX4_DOCKER_REPO} /bin/bash -c "$1 $2 $3"
|
||||
--env=LOCAL_USER_ID="$(id -u)" \
|
||||
--env=AWS_ACCESS_KEY_ID \
|
||||
--env=AWS_SECRET_ACCESS_KEY \
|
||||
--env=BRANCH_NAME \
|
||||
--env=CCACHE_DIR="${CCACHE_DIR}" \
|
||||
--env=CI \
|
||||
--publish 14556:14556/udp \
|
||||
--volume=/tmp/.X11-unix:/tmp/.X11-unix \
|
||||
--volume=/tmp:/tmp:rw \
|
||||
--volume=${SRC_DIR}:${SRC_DIR}:rw \
|
||||
${PX4_DOCKER_REPO} /bin/bash -c "$1 $2 $3"
|
||||
|
||||
@@ -330,7 +330,7 @@ def get_mixers(yaml_config, output_functions, verbose):
|
||||
option = select_param + '==' + str(type_index)
|
||||
mixer_config = {
|
||||
'option': option,
|
||||
'help-url': 'https://docs.px4.io/main/en/config/actuators.html',
|
||||
'help-url': 'https://docs.px4.io/master/en/config/actuators.html',
|
||||
}
|
||||
for optional in ['type', 'title']:
|
||||
if optional in current_type:
|
||||
|
||||
@@ -8,7 +8,7 @@ class MarkdownTablesOutput():
|
||||
result = """# Airframes Reference
|
||||
|
||||
:::note
|
||||
**This list is [auto-generated](https://github.com/PX4/PX4-Autopilot/blob/main/Tools/px4airframes/markdownout.py) from the source code** using the build command: `make airframe_metadata`.
|
||||
**This list is [auto-generated](https://github.com/PX4/PX4-Autopilot/blob/master/Tools/px4airframes/markdownout.py) from the source code** using the build command: `make airframe_metadata`.
|
||||
:::
|
||||
|
||||
This page lists all supported airframes and types including the motor assignment and numbering.
|
||||
|
||||
@@ -69,7 +69,7 @@ The generated files will be written to the `modules` directory.
|
||||
result = ''
|
||||
for module in module_list:
|
||||
result += "## %s\n" % module.name()
|
||||
result += "Source: [%s](https://github.com/PX4/PX4-Autopilot/tree/main/src/%s)\n\n" % (module.scope(), module.scope())
|
||||
result += "Source: [%s](https://github.com/PX4/PX4-Autopilot/tree/master/src/%s)\n\n" % (module.scope(), module.scope())
|
||||
doc = module.documentation()
|
||||
if len(doc) > 0:
|
||||
result += "%s\n" % doc
|
||||
|
||||
@@ -12,7 +12,7 @@ class ModuleDocumentation(object):
|
||||
"""
|
||||
|
||||
# If you add categories or subcategories, they also need to be added to the
|
||||
# TOC in https://github.com/PX4/PX4-user_guide/blob/main/en/SUMMARY.md
|
||||
# TOC in https://github.com/PX4/Devguide/blob/master/en/SUMMARY.md
|
||||
valid_categories = ['driver', 'estimator', 'controller', 'system',
|
||||
'communication', 'command', 'template', 'simulation', 'autotune']
|
||||
valid_subcategories = ['', 'distance_sensor', 'imu', 'airspeed_sensor',
|
||||
|
||||
@@ -331,7 +331,7 @@ class uploader(object):
|
||||
|
||||
except NotImplementedError:
|
||||
raise RuntimeError("Programing not supported for this version of silicon!\n"
|
||||
"See https://docs.px4.io/main/en/flight_controller/silicon_errata.html")
|
||||
"See https://docs.px4.io/master/en/flight_controller/silicon_errata.html")
|
||||
except RuntimeError:
|
||||
# timeout, no response yet
|
||||
return False
|
||||
|
||||
@@ -0,0 +1,51 @@
|
||||
#
|
||||
# PX4 base development environment
|
||||
#
|
||||
|
||||
FROM ubuntu:20.04
|
||||
LABEL maintainer="Daniel Agar <daniel@agar.ca>, Ramon Roche <mrpollo@gmail.com>"
|
||||
|
||||
ENV DEBIAN_FRONTEND noninteractive
|
||||
ENV LANG C.UTF-8
|
||||
ENV LC_ALL C.UTF-8
|
||||
|
||||
# Installing required utilities
|
||||
RUN apt-get update && apt-get -y --quiet --no-install-recommends install \
|
||||
ca-certificates \
|
||||
gnupg \
|
||||
lsb-core \
|
||||
lsb-release \
|
||||
sudo \
|
||||
software-properties-common \
|
||||
wget \
|
||||
gosu \
|
||||
;
|
||||
|
||||
# Install PX4 Requirements
|
||||
COPY Tools/setup/requirements.txt /tmp/requirements.txt
|
||||
COPY Tools/setup/ubuntu.sh /tmp/ubuntu.sh
|
||||
# The PATH env is set within ubuntu.sh, but given how we
|
||||
# are running the image using `gosu` to avoid read-only problems
|
||||
# with the filesystem the env variable does not persist
|
||||
ENV PATH="/opt/gcc-arm-none-eabi-9-2020-q2-update/bin:$PATH"
|
||||
|
||||
RUN bash /tmp/ubuntu.sh --from-docker
|
||||
|
||||
ENV DISPLAY :99
|
||||
|
||||
ENV FASTRTPSGEN_DIR="/usr/local/bin/"
|
||||
ENV TERM=xterm
|
||||
ENV TZ=UTC
|
||||
|
||||
# SITL UDP PORTS
|
||||
EXPOSE 14556/udp
|
||||
EXPOSE 14557/udp
|
||||
|
||||
# create user with id 1001 (jenkins docker workflow default)
|
||||
RUN useradd --shell /bin/bash -u 1001 -c "" -m user && usermod -a -G dialout user
|
||||
|
||||
# create and start as LOCAL_USER_ID
|
||||
COPY Tools/setup/docker-entrypoint.sh /usr/local/bin/entrypoint.sh
|
||||
ENTRYPOINT ["/usr/local/bin/entrypoint.sh"]
|
||||
|
||||
CMD ["/bin/bash"]
|
||||
Executable
+29
@@ -0,0 +1,29 @@
|
||||
#!/bin/bash
|
||||
|
||||
echo "[docker-entrypoint.sh] Starting entrypoint"
|
||||
# Start virtual X server in the background
|
||||
# - DISPLAY default is :99, set in dockerfile
|
||||
# - Users can override with `-e DISPLAY=` in `docker run` command to avoid
|
||||
# running Xvfb and attach their screen
|
||||
if [[ -x "$(command -v Xvfb)" && "$DISPLAY" == ":99" ]]; then
|
||||
echo "[docker-entrypoint.sh] Starting Xvfb"
|
||||
Xvfb :99 -screen 0 1600x1200x24+32 &
|
||||
fi
|
||||
|
||||
# Check if the ROS_DISTRO is passed and use it
|
||||
# to source the ROS environment
|
||||
if [ -n "${ROS_DISTRO}" ]; then
|
||||
source "/opt/ros/$ROS_DISTRO/setup.bash"
|
||||
fi
|
||||
|
||||
# Use the LOCAL_USER_ID if passed in at runtime
|
||||
if [ -n "${LOCAL_USER_ID}" ]; then
|
||||
echo "[docker-entrypoint.sh] Starting with UID : $LOCAL_USER_ID"
|
||||
# modify existing user's id
|
||||
usermod -u $LOCAL_USER_ID user
|
||||
|
||||
# run as user
|
||||
exec gosu user "$@"
|
||||
else
|
||||
exec "$@"
|
||||
fi
|
||||
+122
-71
@@ -2,20 +2,18 @@
|
||||
|
||||
set -e
|
||||
|
||||
## Bash script to setup PX4 development environment on Ubuntu LTS (20.04, 18.04, 16.04).
|
||||
## Bash script to setup PX4 development environment on Ubuntu LTS (20.04, 18.04).
|
||||
## Can also be used in docker.
|
||||
##
|
||||
## Installs:
|
||||
## - Common dependencies and tools for nuttx, jMAVSim, Gazebo
|
||||
## - Common dependencies and tools for NuttX, and Gazebo
|
||||
## - NuttX toolchain (omit with arg: --no-nuttx)
|
||||
## - jMAVSim and Gazebo9 simulator (omit with arg: --no-sim-tools)
|
||||
##
|
||||
## Not Installs:
|
||||
## - FastRTPS and FastCDR
|
||||
## - Gazebo simulator (omit with arg: --no-sim-tools)
|
||||
|
||||
INSTALL_NUTTX="true"
|
||||
INSTALL_SIM="true"
|
||||
INSTALL_ARCH=`uname -m`
|
||||
INSIDE_DOCKER="false"
|
||||
|
||||
# Parse arguments
|
||||
for arg in "$@"
|
||||
@@ -28,19 +26,22 @@ do
|
||||
INSTALL_SIM="false"
|
||||
fi
|
||||
|
||||
done
|
||||
|
||||
# detect if running in docker
|
||||
if [ -f /.dockerenv ]; then
|
||||
echo "Running within docker, installing initial dependencies";
|
||||
apt-get --quiet -y update && DEBIAN_FRONTEND=noninteractive apt-get --quiet -y install \
|
||||
ca-certificates \
|
||||
gnupg \
|
||||
lsb-core \
|
||||
sudo \
|
||||
wget \
|
||||
;
|
||||
fi
|
||||
if [[ $arg == "--from-docker" ]]; then
|
||||
INSIDE_DOCKER="true"
|
||||
fi
|
||||
|
||||
if [[ $arg == "--help" ]]; then
|
||||
echo "#⚡️ PX4 Dependency Installer for Ubuntu"
|
||||
echo "# Options:
|
||||
#
|
||||
# --no-nuttx boolean
|
||||
# --no-sim-tools boolean"
|
||||
echo "#"
|
||||
exit
|
||||
fi
|
||||
|
||||
done
|
||||
|
||||
# script directory
|
||||
DIR=$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )
|
||||
@@ -69,9 +70,22 @@ elif [[ "${UBUNTU_RELEASE}" == "20.04" ]]; then
|
||||
echo "Ubuntu 20.04"
|
||||
fi
|
||||
|
||||
VERBOSE_BAR="####################"
|
||||
echo
|
||||
echo $VERBOSE_BAR
|
||||
echo "#⚡️ Starting PX4 Dependency Installer for Ubuntu ${UBUNTU_RELEASE} (${INSTALL_ARCH})"
|
||||
echo "# Options:
|
||||
#
|
||||
# - Install NuttX = ${INSTALL_NUTTX}
|
||||
# - Install Simulation = ${INSTALL_SIM}"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
echo
|
||||
echo "Installing PX4 general dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo "🍻 Installing System Dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
sudo apt-get update -y --quiet
|
||||
sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends install \
|
||||
@@ -85,6 +99,7 @@ sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends i
|
||||
gdb \
|
||||
git \
|
||||
lcov \
|
||||
libssl-dev \
|
||||
libxml2-dev \
|
||||
libxml2-utils \
|
||||
make \
|
||||
@@ -100,32 +115,42 @@ sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends i
|
||||
zip \
|
||||
;
|
||||
|
||||
# Python3 dependencies
|
||||
# Python 3 dependencies
|
||||
echo
|
||||
echo "Installing PX4 Python3 dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo "🍻 Installing Python dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
if [ -n "$VIRTUAL_ENV" ]; then
|
||||
# virtual environments don't allow --user option
|
||||
python -m pip install -r ${DIR}/requirements.txt
|
||||
else
|
||||
# older versions of Ubuntu require --user option
|
||||
python3 -m pip install --user -r ${DIR}/requirements.txt
|
||||
if [[ $INSIDE_DOCKER == "true" ]]; then
|
||||
# when running inside a docker container we don't need to install
|
||||
# under --user since the installer user is root
|
||||
# its best to install packages globaly for any user to find
|
||||
python3 -m pip install -r /tmp/requirements.txt
|
||||
else
|
||||
python3 -m pip install --user -r ${DIR}/requirements.txt
|
||||
fi
|
||||
fi
|
||||
|
||||
# NuttX toolchain (arm-none-eabi-gcc)
|
||||
if [[ $INSTALL_NUTTX == "true" ]]; then
|
||||
|
||||
echo
|
||||
echo "Installing NuttX dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo "🍻 Installing NuttX dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends install \
|
||||
automake \
|
||||
binutils-dev \
|
||||
bison \
|
||||
build-essential \
|
||||
flex \
|
||||
g++-multilib \
|
||||
gcc-multilib \
|
||||
gdb-multiarch \
|
||||
genromfs \
|
||||
gettext \
|
||||
gperf \
|
||||
@@ -145,7 +170,12 @@ if [[ $INSTALL_NUTTX == "true" ]]; then
|
||||
u-boot-tools \
|
||||
util-linux \
|
||||
vim-common \
|
||||
g++-arm-linux-gnueabihf \
|
||||
gcc-arm-linux-gnueabihf \
|
||||
g++-aarch64-linux-gnu \
|
||||
gcc-aarch64-linux-gnu \
|
||||
;
|
||||
|
||||
if [[ "${UBUNTU_RELEASE}" == "20.04" ]]; then
|
||||
sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends install \
|
||||
kconfig-frontends \
|
||||
@@ -158,32 +188,47 @@ if [[ $INSTALL_NUTTX == "true" ]]; then
|
||||
sudo usermod -a -G dialout $USER
|
||||
fi
|
||||
|
||||
# arm-none-eabi-gcc
|
||||
NUTTX_GCC_VERSION="9-2020-q2-update"
|
||||
NUTTX_GCC_VERSION_SHORT="9-2020q2"
|
||||
echo
|
||||
echo $VERBOSE_BAR
|
||||
echo "🍻 Verifying proper gcc version (${NUTTX_GCC_VERSION}), and installing if not found"
|
||||
echo
|
||||
|
||||
source $HOME/.profile # load changed path for the case the script is reran before relogin
|
||||
if [ $(which arm-none-eabi-gcc) ]; then
|
||||
GCC_VER_STR=$(arm-none-eabi-gcc --version)
|
||||
GCC_FOUND_VER=$(echo $GCC_VER_STR | grep -c "${NUTTX_GCC_VERSION}")
|
||||
GCC_VER_FOUND=$(echo $GCC_VER_STR | grep -c "${NUTTX_GCC_VERSION}")
|
||||
fi
|
||||
|
||||
if [[ "$GCC_FOUND_VER" == "1" ]]; then
|
||||
echo "arm-none-eabi-gcc-${NUTTX_GCC_VERSION} found, skipping installation"
|
||||
if [[ $(echo $GCC_VER_STR | grep -c "${NUTTX_GCC_VERSION}") == "1" ]]; then
|
||||
echo "📌 Skipping installation, the arm cross compiler was found"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
else
|
||||
echo "Installing arm-none-eabi-gcc-${NUTTX_GCC_VERSION}";
|
||||
wget -O /tmp/gcc-arm-none-eabi-${NUTTX_GCC_VERSION}-linux.tar.bz2 https://armkeil.blob.core.windows.net/developer/Files/downloads/gnu-rm/${NUTTX_GCC_VERSION_SHORT}/gcc-arm-none-eabi-${NUTTX_GCC_VERSION}-${INSTALL_ARCH}-linux.tar.bz2 && \
|
||||
sudo tar -jxf /tmp/gcc-arm-none-eabi-${NUTTX_GCC_VERSION}-linux.tar.bz2 -C /opt/;
|
||||
echo "📌 The arm cross compiler was not found";
|
||||
echo " * Installing arm-none-eabi-gcc-${NUTTX_GCC_VERSION}";
|
||||
COMPILER_NAME="gcc-arm-none-eabi-${NUTTX_GCC_VERSION}"
|
||||
COMPILER_PATH="/tmp/$COMPILER_NAME-linux.tar.bz2"
|
||||
wget -O $COMPILER_PATH https://armkeil.blob.core.windows.net/developer/Files/downloads/gnu-rm/${NUTTX_GCC_VERSION_SHORT}/${COMPILER_NAME}-${INSTALL_ARCH}-linux.tar.bz2
|
||||
sudo tar -jxf $COMPILER_PATH -C /opt/;
|
||||
|
||||
# add arm-none-eabi-gcc to user's PATH
|
||||
exportline="export PATH=/opt/gcc-arm-none-eabi-${NUTTX_GCC_VERSION}/bin:\$PATH"
|
||||
|
||||
if grep -Fxq "$exportline" $HOME/.profile; then
|
||||
exportline="export PATH=\"/opt/${COMPILER_NAME}/bin:\$PATH\""
|
||||
if [[ $INSIDE_DOCKER == "true" ]]; then
|
||||
# when running on a docker container its best to set the environment globally
|
||||
# since we don't know which user is going to be running commands on the container
|
||||
touch /etc/profile.d/px4env.sh
|
||||
echo $exportline >> /etc/profile.d/px4env.sh
|
||||
elif grep -Fxq "$exportline" $HOME/.profile; then
|
||||
echo "${NUTTX_GCC_VERSION} path already set.";
|
||||
else
|
||||
echo $exportline >> $HOME/.profile;
|
||||
fi
|
||||
echo " * arm-none-eabi-gcc (${NUTTX_GCC_VERSION}) Installed Succesful to /opt/${COMPILER_NAME}/bin"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
fi
|
||||
fi
|
||||
|
||||
@@ -191,45 +236,32 @@ fi
|
||||
if [[ $INSTALL_SIM == "true" ]]; then
|
||||
|
||||
echo
|
||||
echo "Installing PX4 simulation dependencies"
|
||||
echo $VERBOSE_BAR
|
||||
echo "🍻 Installing PX4 Simulation Tools"
|
||||
echo
|
||||
|
||||
# default and Ubuntu 20.04
|
||||
gazebo_version=11
|
||||
gazebo_packages="gazebo$gazebo_version libgazebo$gazebo_version-dev"
|
||||
if [[ "${UBUNTU_RELEASE}" == "18.04" ]]; then
|
||||
gazebo_version=9
|
||||
elif [[ "${UBUNTU_RELEASE}" == "22.04" ]]; then
|
||||
gazebo_version=11
|
||||
gazebo_packages="gazebo libgazebo-dev"
|
||||
fi
|
||||
|
||||
echo " * Gazebo Version $gazebo_version"
|
||||
echo $VERBOSE_BAR
|
||||
|
||||
# General simulation dependencies
|
||||
sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends install \
|
||||
bc \
|
||||
;
|
||||
|
||||
if [[ "${UBUNTU_RELEASE}" == "18.04" ]]; then
|
||||
java_version=11
|
||||
elif [[ "${UBUNTU_RELEASE}" == "20.04" ]]; then
|
||||
java_version=13
|
||||
elif [[ "${UBUNTU_RELEASE}" == "22.04" ]]; then
|
||||
java_version=11
|
||||
else
|
||||
java_version=14
|
||||
fi
|
||||
# Java (jmavsim or fastrtps)
|
||||
sudo DEBIAN_FRONTEND=noninteractive apt-get -y --quiet --no-install-recommends install \
|
||||
ant \
|
||||
openjdk-$java_version-jre \
|
||||
openjdk-$java_version-jdk \
|
||||
libvecmath-java \
|
||||
;
|
||||
|
||||
# Set Java 11 as default
|
||||
sudo update-alternatives --set java $(update-alternatives --list java | grep "java-$java_version")
|
||||
|
||||
# Gazebo
|
||||
if [[ "${UBUNTU_RELEASE}" == "18.04" ]]; then
|
||||
gazebo_version=9
|
||||
gazebo_packages="gazebo$gazebo_version libgazebo$gazebo_version-dev"
|
||||
elif [[ "${UBUNTU_RELEASE}" == "22.04" ]]; then
|
||||
gazebo_packages="gazebo libgazebo-dev"
|
||||
else
|
||||
# default and Ubuntu 20.04
|
||||
gazebo_version=11
|
||||
gazebo_packages="gazebo$gazebo_version libgazebo$gazebo_version-dev"
|
||||
fi
|
||||
|
||||
# Installing Gazebo and dependencies
|
||||
# Setup OSRF Gazebo repository
|
||||
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
|
||||
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
|
||||
# Update list, since new gazebo-stable.list has been added
|
||||
@@ -257,7 +289,26 @@ if [[ $INSTALL_SIM == "true" ]]; then
|
||||
fi
|
||||
fi
|
||||
|
||||
if [[ $INSTALL_NUTTX == "true" ]]; then
|
||||
echo
|
||||
echo "Relogin or reboot computer before attempting to build NuttX targets"
|
||||
if [[ $INSIDE_DOCKER == "true" ]]; then
|
||||
# cleanup installation
|
||||
rm -rf /tmp/
|
||||
fi
|
||||
|
||||
if [[ $INSIDE_DOCKER == "false" ]] && [[ $INSTALL_NUTTX == "true" ]]; then
|
||||
echo
|
||||
echo $VERBOSE_BAR
|
||||
echo "💡 We recommend you relogin/reboot before attempting to build NuttX targets"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
fi
|
||||
|
||||
echo
|
||||
echo
|
||||
echo $VERBOSE_BAR
|
||||
echo "#⚡️ PX4 Dependency Installer Ended Succesfully
|
||||
#
|
||||
# For more information on PX4 Autopilot check out our docs
|
||||
# at docs.px4.io, if you find a bug please file an issue
|
||||
# on GitHub https://github.com/px4/px4-autopilot"
|
||||
echo $VERBOSE_BAR
|
||||
echo
|
||||
|
||||
@@ -694,7 +694,7 @@ class OutputJSON(object):
|
||||
node['type'] = 'topic'
|
||||
node['color'] = topic_colors[topic]
|
||||
# url is opened when double-clicking on the node
|
||||
node['url'] = 'https://github.com/PX4/PX4-Autopilot/blob/main/msg/'+topic_filename(topic)+'.msg'
|
||||
node['url'] = 'https://github.com/PX4/PX4-Autopilot/blob/master/msg/'+topic_filename(topic)+'.msg'
|
||||
nodes.append(node)
|
||||
|
||||
data['nodes'] = nodes
|
||||
|
||||
@@ -41,7 +41,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -56,7 +56,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led
|
||||
|
||||
@@ -56,7 +56,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led
|
||||
|
||||
@@ -55,7 +55,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led
|
||||
nuttx_arch
|
||||
|
||||
@@ -42,7 +42,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -59,7 +59,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -42,7 +42,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -56,7 +56,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -47,7 +47,6 @@ add_dependencies(drivers_board arch_board_hw_info)
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_board_hw_info
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -57,7 +57,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led
|
||||
|
||||
@@ -57,7 +57,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led
|
||||
|
||||
@@ -57,7 +57,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led
|
||||
|
||||
@@ -46,7 +46,6 @@ add_dependencies(drivers_board arch_board_hw_info)
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -60,7 +60,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -43,7 +43,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -43,7 +43,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -55,7 +55,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led
|
||||
nuttx_arch
|
||||
|
||||
@@ -55,7 +55,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led
|
||||
nuttx_arch
|
||||
|
||||
@@ -55,7 +55,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led
|
||||
nuttx_arch
|
||||
|
||||
@@ -46,7 +46,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
nuttx_arch # sdio
|
||||
nuttx_drivers # sdio
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -45,7 +45,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
nuttx_arch # sdio
|
||||
nuttx_drivers # sdio
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -52,7 +52,6 @@ add_dependencies(drivers_board nuttx_context)
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_board_hw_info
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
@@ -9,3 +9,12 @@ param set-default BAT2_V_DIV 18.1
|
||||
|
||||
param set-default BAT1_A_PER_V 36.367515152
|
||||
param set-default BAT2_A_PER_V 36.367515152
|
||||
|
||||
# Mavlink ethernet (CFG 1000)
|
||||
param set-default MAV_2_CONFIG 1000
|
||||
param set-default MAV_2_BROADCAST 1
|
||||
param set-default MAV_2_MODE 0
|
||||
param set-default MAV_2_RADIO_CTL 0
|
||||
param set-default MAV_2_RATE 100000
|
||||
param set-default MAV_2_REMOTE_PRT 14550
|
||||
param set-default MAV_2_UDP_PRT 14550
|
||||
|
||||
@@ -60,7 +60,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -60,7 +60,6 @@ else()
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
arch_board_hw_info
|
||||
drivers__led # drv_led_start
|
||||
|
||||
@@ -46,7 +46,6 @@ add_library(drivers_board
|
||||
|
||||
target_link_libraries(drivers_board
|
||||
PRIVATE
|
||||
arch_io_pins
|
||||
arch_spi
|
||||
drivers__led # drv_led_start
|
||||
nuttx_arch # sdio
|
||||
|
||||
+1
-1
@@ -310,7 +310,7 @@ if(EXISTS ${BOARD_DEFCONFIG})
|
||||
endif()
|
||||
|
||||
if (NO_HELP)
|
||||
add_definitions(-DCONSTRAINED_FLASH_NO_HELP="https://docs.px4.io/main/en/modules/modules_main.html")
|
||||
add_definitions(-DCONSTRAINED_FLASH_NO_HELP="https://docs.px4.io/master/en/modules/modules_main.html")
|
||||
endif()
|
||||
|
||||
if(CONSTRAINED_MEMORY)
|
||||
|
||||
@@ -20,4 +20,3 @@ bool fused # true if the sample was successfully fused
|
||||
|
||||
# TOPICS estimator_aid_source_1d
|
||||
# TOPICS estimator_aid_src_baro_hgt estimator_aid_src_rng_hgt estimator_aid_src_airspeed
|
||||
# TOPICS estimator_aid_src_mag_heading estimator_aid_src_gnss_yaw estimator_aid_src_ev_yaw
|
||||
|
||||
@@ -20,4 +20,3 @@ bool[3] fused # true if the sample was successfully fused
|
||||
|
||||
# TOPICS estimator_aid_source_3d
|
||||
# TOPICS estimator_aid_src_gnss_pos estimator_aid_src_gnss_vel
|
||||
# TOPICS estimator_aid_src_mag estimator_aid_src_aux_vel
|
||||
|
||||
@@ -65,6 +65,9 @@ bool reject_hor_vel # 0 - true if horizontal velocity obs
|
||||
bool reject_ver_vel # 1 - true if vertical velocity observations have been rejected
|
||||
bool reject_hor_pos # 2 - true if horizontal position observations have been rejected
|
||||
bool reject_ver_pos # 3 - true if vertical position observations have been rejected
|
||||
bool reject_mag_x # 4 - true if the X magnetometer observation has been rejected
|
||||
bool reject_mag_y # 5 - true if the Y magnetometer observation has been rejected
|
||||
bool reject_mag_z # 6 - true if the Z magnetometer observation has been rejected
|
||||
bool reject_yaw # 7 - true if the yaw observation has been rejected
|
||||
bool reject_airspeed # 8 - true if the airspeed observation has been rejected
|
||||
bool reject_sideslip # 9 - true if the synthetic sideslip observation has been rejected
|
||||
|
||||
@@ -354,7 +354,7 @@ def generate_agent(out_dir):
|
||||
# the '-typeros2' option in fastrtpsgen.
|
||||
# .. note:: This is only available in FastRTPSGen 1.0.4 and above
|
||||
gen_ros2_typename = ""
|
||||
if ros2_distro and ros2_distro in ['dashing', 'eloquent', 'foxy', 'galactic', 'humble', 'rolling'] and fastrtpsgen_version >= version.Version("1.0.4"):
|
||||
if ros2_distro and ros2_distro in ['dashing', 'eloquent', 'foxy', 'galactic', 'rolling'] and fastrtpsgen_version >= version.Version("1.0.4"):
|
||||
gen_ros2_typename = "-typeros2 "
|
||||
|
||||
idl_files = []
|
||||
|
||||
@@ -38,7 +38,7 @@ if __name__ == "__main__":
|
||||
print("{:} -> {:}".format(msg_filename, output_file))
|
||||
|
||||
#Format msg url
|
||||
msg_url="[source file](https://github.com/PX4/PX4-Autopilot/blob/main/msg/%s)" % msg_file
|
||||
msg_url="[source file](https://github.com/PX4/PX4-Autopilot/blob/master/msg/%s)" % msg_file
|
||||
|
||||
msg_description = ""
|
||||
summary_description = ""
|
||||
@@ -90,7 +90,7 @@ if __name__ == "__main__":
|
||||
readme_text="""# uORB Message Reference
|
||||
|
||||
:::note
|
||||
This list is [auto-generated](https://github.com/PX4/PX4-Autopilot/blob/main/msg/tools/generate_msg_docs.py) from the source code.
|
||||
This list is [auto-generated](https://github.com/PX4/PX4-Autopilot/blob/master/msg/tools/generate_msg_docs.py) from the source code.
|
||||
:::
|
||||
|
||||
This topic lists the UORB messages available in PX4 (some of which may be may be shared by the [PX4-ROS 2 Bridge](../ros/ros2_comm.md)).
|
||||
|
||||
@@ -62,7 +62,7 @@ uint8 DIST_BOTTOM_SENSOR_FLOW = 2 # (1 << 1) a flow sensor is used to estimate d
|
||||
float32 eph # Standard deviation of horizontal position error, (metres)
|
||||
float32 epv # Standard deviation of vertical position error, (metres)
|
||||
float32 evh # Standard deviation of horizontal velocity error, (metres/sec)
|
||||
float32 evv # Standard deviation of vertical velocity error, (metres/sec)
|
||||
float32 evv # Standard deviation of horizontal velocity error, (metres/sec)
|
||||
|
||||
bool dead_reckoning # True if this position is estimated through dead-reckoning
|
||||
|
||||
|
||||
+54
-17
@@ -1,31 +1,68 @@
|
||||
# Vehicle odometry data. Fits ROS REP 147 for aerial vehicles
|
||||
uint64 timestamp # time since system start (microseconds)
|
||||
|
||||
uint64 timestamp_sample
|
||||
|
||||
uint8 POSE_FRAME_UNKNOWN = 0
|
||||
uint8 POSE_FRAME_NED = 1 # NED earth-fixed frame
|
||||
uint8 POSE_FRAME_FRD = 2 # FRD world-fixed frame, arbitrary heading reference
|
||||
uint8 pose_frame # Position and orientation frame of reference
|
||||
# Covariance matrix index constants
|
||||
uint8 COVARIANCE_MATRIX_X_VARIANCE=0
|
||||
uint8 COVARIANCE_MATRIX_Y_VARIANCE=6
|
||||
uint8 COVARIANCE_MATRIX_Z_VARIANCE=11
|
||||
uint8 COVARIANCE_MATRIX_ROLL_VARIANCE=15
|
||||
uint8 COVARIANCE_MATRIX_PITCH_VARIANCE=18
|
||||
uint8 COVARIANCE_MATRIX_YAW_VARIANCE=20
|
||||
uint8 COVARIANCE_MATRIX_VX_VARIANCE=0
|
||||
uint8 COVARIANCE_MATRIX_VY_VARIANCE=6
|
||||
uint8 COVARIANCE_MATRIX_VZ_VARIANCE=11
|
||||
uint8 COVARIANCE_MATRIX_ROLLRATE_VARIANCE=15
|
||||
uint8 COVARIANCE_MATRIX_PITCHRATE_VARIANCE=18
|
||||
uint8 COVARIANCE_MATRIX_YAWRATE_VARIANCE=20
|
||||
|
||||
float32[3] position # Position in meters. Frame of reference defined by local_frame. NaN if invalid/unknown
|
||||
float32[4] q # Quaternion rotation from FRD body frame to reference frame. First value NaN if invalid/unknown
|
||||
# Position and linear velocity frame of reference constants
|
||||
uint8 LOCAL_FRAME_NED=0 # NED earth-fixed frame
|
||||
uint8 LOCAL_FRAME_FRD=1 # FRD earth-fixed frame, arbitrary heading reference
|
||||
uint8 LOCAL_FRAME_OTHER=2 # Not aligned with the std frames of reference
|
||||
uint8 BODY_FRAME_FRD=3 # FRD body-fixed frame
|
||||
|
||||
uint8 VELOCITY_FRAME_UNKNOWN = 0
|
||||
uint8 VELOCITY_FRAME_NED = 1 # NED earth-fixed frame
|
||||
uint8 VELOCITY_FRAME_FRD = 2 # FRD world-fixed frame, arbitrary heading reference
|
||||
uint8 VELOCITY_FRAME_BODY_FRD = 3 # FRD body-fixed frame
|
||||
uint8 velocity_frame # Reference frame of the velocity data
|
||||
# Position and linear velocity local frame of reference
|
||||
uint8 local_frame
|
||||
|
||||
float32[3] velocity # Velocity in meters/sec. Frame of reference defined by velocity_frame variable. NaN if invalid/unknown
|
||||
# Position in meters. Frame of reference defined by local_frame. NaN if invalid/unknown
|
||||
float32 x # North position
|
||||
float32 y # East position
|
||||
float32 z # Down position
|
||||
|
||||
float32[3] angular_velocity # Angular velocity in body-fixed frame (rad/s). NaN if invalid/unknown
|
||||
# Orientation quaternion. First value NaN if invalid/unknown
|
||||
float32[4] q # Quaternion rotation from FRD body frame to reference frame
|
||||
float32[4] q_offset # Quaternion rotation from odometry reference frame to navigation frame
|
||||
|
||||
float32[3] position_variance
|
||||
float32[3] orientation_variance
|
||||
float32[3] velocity_variance
|
||||
# Row-major representation of 6x6 pose cross-covariance matrix URT.
|
||||
# NED earth-fixed frame.
|
||||
# Order: x, y, z, rotation about X axis, rotation about Y axis, rotation about Z axis
|
||||
# If position covariance invalid/unknown, first cell is NaN
|
||||
# If orientation covariance invalid/unknown, 16th cell is NaN
|
||||
float32[21] pose_covariance
|
||||
|
||||
# Reference frame of the velocity data
|
||||
uint8 velocity_frame
|
||||
|
||||
# Velocity in meters/sec. Frame of reference defined by velocity_frame variable. NaN if invalid/unknown
|
||||
float32 vx # North velocity
|
||||
float32 vy # East velocity
|
||||
float32 vz # Down velocity
|
||||
|
||||
# Angular rate in body-fixed frame (rad/s). NaN if invalid/unknown
|
||||
float32 rollspeed # Angular velocity about X body axis
|
||||
float32 pitchspeed # Angular velocity about Y body axis
|
||||
float32 yawspeed # Angular velocity about Z body axis
|
||||
|
||||
# Row-major representation of 6x6 velocity cross-covariance matrix URT.
|
||||
# Linear velocity in NED earth-fixed frame. Angular velocity in body-fixed frame.
|
||||
# Order: vx, vy, vz, rotation rate about X axis, rotation rate about Y axis, rotation rate about Z axis
|
||||
# If linear velocity covariance invalid/unknown, first cell is NaN
|
||||
# If angular velocity covariance invalid/unknown, 16th cell is NaN
|
||||
float32[21] velocity_covariance
|
||||
|
||||
uint8 reset_counter
|
||||
int8 quality
|
||||
|
||||
# TOPICS vehicle_odometry vehicle_mocap_odometry vehicle_visual_odometry
|
||||
# TOPICS estimator_odometry estimator_visual_odometry_aligned
|
||||
|
||||
@@ -33,7 +33,7 @@
|
||||
|
||||
if("${CMAKE_CXX_COMPILER_ID}" MATCHES "GNU")
|
||||
if(CMAKE_CXX_COMPILER_VERSION VERSION_LESS_EQUAL 7)
|
||||
message(FATAL_ERROR "GCC 7 or older no longer supported. https://docs.px4.io/main/en/dev_setup/dev_env.html")
|
||||
message(FATAL_ERROR "GCC 7 or older no longer supported. https://docs.px4.io/master/en/dev_setup/dev_env.html")
|
||||
endif()
|
||||
endif()
|
||||
|
||||
|
||||
@@ -1,36 +0,0 @@
|
||||
############################################################################
|
||||
#
|
||||
# Copyright (c) 2021 PX4 Development Team. All rights reserved.
|
||||
#
|
||||
# Redistribution and use in source and binary forms, with or without
|
||||
# modification, are permitted provided that the following conditions
|
||||
# are met:
|
||||
#
|
||||
# 1. Redistributions of source code must retain the above copyright
|
||||
# notice, this list of conditions and the following disclaimer.
|
||||
# 2. Redistributions in binary form must reproduce the above copyright
|
||||
# notice, this list of conditions and the following disclaimer in
|
||||
# the documentation and/or other materials provided with the
|
||||
# distribution.
|
||||
# 3. Neither the name PX4 nor the names of its contributors may be
|
||||
# used to endorse or promote products derived from this software
|
||||
# without specific prior written permission.
|
||||
#
|
||||
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
|
||||
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
|
||||
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
|
||||
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
|
||||
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
|
||||
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
|
||||
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
|
||||
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
|
||||
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
|
||||
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
|
||||
# POSSIBILITY OF SUCH DAMAGE.
|
||||
#
|
||||
############################################################################
|
||||
|
||||
px4_add_library(arch_watchdog_iwdg
|
||||
iwdg.c
|
||||
)
|
||||
@@ -103,7 +103,7 @@ Serial bus driver for the LeddarOne LiDAR.
|
||||
|
||||
Most boards are configured to enable/start the driver on a specified UART using the SENS_LEDDAR1_CFG parameter.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/leddar_one.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/leddar_one.html
|
||||
|
||||
### Examples
|
||||
|
||||
|
||||
@@ -417,7 +417,7 @@ void LightwareLaser::print_usage()
|
||||
|
||||
I2C bus driver for Lightware SFxx series LIDAR rangefinders: SF10/a, SF10/b, SF10/c, SF11/c, SF/LW20.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/sfxx_lidar.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/sfxx_lidar.html
|
||||
)DESCR_STR");
|
||||
|
||||
PRINT_MODULE_USAGE_NAME("lightware_laser_i2c", "driver");
|
||||
|
||||
@@ -104,7 +104,7 @@ Serial bus driver for the LightWare SF02/F, SF10/a, SF10/b, SF10/c, SF11/c Laser
|
||||
|
||||
Most boards are configured to enable/start the driver on a specified UART using the SENS_SF0X_CFG parameter.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/sfxx_lidar.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/sfxx_lidar.html
|
||||
|
||||
### Examples
|
||||
|
||||
|
||||
@@ -57,7 +57,7 @@ I2C bus driver for LidarLite rangefinders.
|
||||
|
||||
The sensor/driver must be enabled using the parameter SENS_EN_LL40LS.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/lidar_lite.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/lidar_lite.html
|
||||
)DESCR_STR");
|
||||
|
||||
PRINT_MODULE_USAGE_NAME("ll40ls", "driver");
|
||||
|
||||
@@ -147,7 +147,7 @@ PWM driver for LidarLite rangefinders.
|
||||
|
||||
The sensor/driver must be enabled using the parameter SENS_EN_LL40LS.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/lidar_lite.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/lidar_lite.html
|
||||
)DESCR_STR");
|
||||
|
||||
PRINT_MODULE_USAGE_NAME("ll40ls", "driver");
|
||||
|
||||
@@ -47,7 +47,7 @@ I2C bus driver for TeraRanger rangefinders.
|
||||
|
||||
The sensor/driver must be enabled using the parameter SENS_EN_TRANGER.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/rangefinders.html#teraranger-rangefinders
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/rangefinders.html#teraranger-rangefinders
|
||||
)DESCR_STR");
|
||||
PRINT_MODULE_USAGE_NAME("teraranger", "driver");
|
||||
PRINT_MODULE_USAGE_SUBCATEGORY("distance_sensor");
|
||||
|
||||
@@ -115,7 +115,7 @@ Serial bus driver for the Benewake TFmini LiDAR.
|
||||
|
||||
Most boards are configured to enable/start the driver on a specified UART using the SENS_TFMINI_CFG parameter.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/tfmini.html
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/tfmini.html
|
||||
|
||||
### Examples
|
||||
|
||||
|
||||
@@ -428,7 +428,7 @@ Serial bus driver for the ThoneFlow-3901U optical flow sensor.
|
||||
|
||||
Most boards are configured to enable/start the driver on a specified UART using the SENS_TFLOW_CFG parameter.
|
||||
|
||||
Setup/usage information: https://docs.px4.io/main/en/sensor/pmw3901.html#thone-thoneflow-3901u
|
||||
Setup/usage information: https://docs.px4.io/master/en/sensor/pmw3901.html#thone-thoneflow-3901u
|
||||
|
||||
### Examples
|
||||
|
||||
|
||||
@@ -494,57 +494,8 @@ void PWMOut::Run()
|
||||
|
||||
void PWMOut::update_params()
|
||||
{
|
||||
uint32_t previously_set_functions = 0;
|
||||
|
||||
for (size_t i = 0; i < _num_outputs; i++) {
|
||||
previously_set_functions |= (uint32_t)_mixing_output.isFunctionSet(i) << i;
|
||||
}
|
||||
|
||||
updateParams();
|
||||
|
||||
// Automatically set the PWM rate and disarmed value when a channel is first set to a servo
|
||||
if (_mixing_output.useDynamicMixing() && !_first_param_update) {
|
||||
for (size_t i = 0; i < _num_outputs; i++) {
|
||||
if ((previously_set_functions & (1u << i)) == 0 && _mixing_output.functionParamHandle(i) != PARAM_INVALID) {
|
||||
int32_t output_function;
|
||||
|
||||
if (param_get(_mixing_output.functionParamHandle(i), &output_function) == 0
|
||||
&& output_function >= (int)OutputFunction::Servo1
|
||||
&& output_function <= (int)OutputFunction::ServoMax) { // Function got set to a servo
|
||||
int32_t val = 1500;
|
||||
PX4_INFO("Setting disarmed to %i for channel %i", (int) val, i);
|
||||
param_set(_mixing_output.disarmedParamHandle(i), &val);
|
||||
|
||||
// If the whole timer group was not set previously, then set the pwm rate to 50 Hz
|
||||
for (int timer = 0; timer < MAX_IO_TIMERS; ++timer) {
|
||||
|
||||
uint32_t channels = io_timer_get_group(timer);
|
||||
|
||||
if ((channels & (1u << i)) == 0) {
|
||||
continue;
|
||||
}
|
||||
|
||||
if ((channels & previously_set_functions) == 0) { // None of the channels was set
|
||||
char param_name[17];
|
||||
snprintf(param_name, sizeof(param_name), "%s_TIM%u", _mixing_output.paramPrefix(), timer);
|
||||
|
||||
int32_t tim_config = 0;
|
||||
param_t handle = param_find(param_name);
|
||||
|
||||
if (param_get(handle, &tim_config) == 0 && tim_config == 400) {
|
||||
tim_config = 50;
|
||||
PX4_INFO("setting timer %i to %i Hz", timer, (int) tim_config);
|
||||
param_set(handle, &tim_config);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
_first_param_update = false;
|
||||
|
||||
if (_mixing_output.useDynamicMixing()) {
|
||||
return;
|
||||
}
|
||||
|
||||
@@ -147,7 +147,6 @@ private:
|
||||
bool _pwm_on{false};
|
||||
uint32_t _pwm_mask{0};
|
||||
bool _pwm_initialized{false};
|
||||
bool _first_param_update{true};
|
||||
|
||||
unsigned _num_disarmed_set{0};
|
||||
|
||||
|
||||
@@ -179,8 +179,6 @@ private:
|
||||
unsigned _max_transfer{16}; ///< Maximum number of I2C transfers supported by PX4IO
|
||||
|
||||
int _class_instance{-1};
|
||||
bool _first_param_update{true};
|
||||
uint32_t _group_channels[PX4IO_P_SETUP_PWM_RATE_GROUP3 - PX4IO_P_SETUP_PWM_RATE_GROUP0 + 1] {};
|
||||
|
||||
hrt_abstime _poll_last{0};
|
||||
|
||||
@@ -479,12 +477,6 @@ int PX4IO::init()
|
||||
return ret;
|
||||
}
|
||||
|
||||
/* initialize _group_channels */
|
||||
for (uint8_t group = PX4IO_P_SETUP_PWM_RATE_GROUP0; group <= PX4IO_P_SETUP_PWM_RATE_GROUP3; ++group) {
|
||||
unsigned group_idx = group - PX4IO_P_SETUP_PWM_RATE_GROUP0;
|
||||
_group_channels[group_idx] = io_reg_get(PX4IO_PAGE_PWM_INFO, PX4IO_RATE_MAP_BASE + group_idx);
|
||||
}
|
||||
|
||||
/* try to claim the generic PWM output device node as well - it's OK if we fail at this */
|
||||
if (_param_sys_hitl.get() <= 0 && _param_sys_use_io.get() == 1) {
|
||||
_class_instance = register_class_devname(PWM_OUTPUT_BASE_DEVICE_PATH);
|
||||
@@ -613,6 +605,8 @@ void PX4IO::Run()
|
||||
|
||||
_param_update_force = false;
|
||||
|
||||
ModuleParams::updateParams();
|
||||
|
||||
update_params();
|
||||
|
||||
/* Check if the flight termination circuit breaker has been updated */
|
||||
@@ -705,67 +699,14 @@ void PX4IO::updateTimerRateGroups()
|
||||
|
||||
void PX4IO::update_params()
|
||||
{
|
||||
uint32_t previously_set_functions = 0;
|
||||
|
||||
for (size_t i = 0; i < _max_actuators; i++) {
|
||||
previously_set_functions |= (uint32_t)_mixing_output.isFunctionSet(i) << i;
|
||||
}
|
||||
|
||||
updateParams();
|
||||
|
||||
if (!_mixing_output.armed().armed && _mixing_output.useDynamicMixing()) {
|
||||
|
||||
// Automatically set the PWM rate and disarmed value when a channel is first set to a servo
|
||||
if (!_first_param_update) {
|
||||
for (size_t i = 0; i < _max_actuators; i++) {
|
||||
if ((previously_set_functions & (1u << i)) == 0 && _mixing_output.functionParamHandle(i) != PARAM_INVALID) {
|
||||
int32_t output_function;
|
||||
|
||||
if (param_get(_mixing_output.functionParamHandle(i), &output_function) == 0
|
||||
&& output_function >= (int)OutputFunction::Servo1
|
||||
&& output_function <= (int)OutputFunction::ServoMax) { // Function got set to a servo
|
||||
int32_t val = 1500;
|
||||
PX4_INFO("Setting disarmed to %i for channel %i", (int) val, i);
|
||||
param_set(_mixing_output.disarmedParamHandle(i), &val);
|
||||
|
||||
// If the whole timer group was not set previously, then set the pwm rate to 50 Hz
|
||||
for (int timer = 0; timer < (int)(sizeof(_group_channels) / sizeof(_group_channels[0])); ++timer) {
|
||||
|
||||
uint32_t channels = _group_channels[timer];
|
||||
|
||||
if ((channels & (1u << i)) == 0) {
|
||||
continue;
|
||||
}
|
||||
|
||||
if ((channels & previously_set_functions) == 0) { // None of the channels was set
|
||||
char param_name[17];
|
||||
snprintf(param_name, sizeof(param_name), "%s_TIM%u", _mixing_output.paramPrefix(), timer);
|
||||
|
||||
int32_t tim_config = 0;
|
||||
param_t handle = param_find(param_name);
|
||||
|
||||
if (param_get(handle, &tim_config) == 0 && tim_config == 400) {
|
||||
tim_config = 50;
|
||||
PX4_INFO("setting timer %i to %i Hz", timer, (int) tim_config);
|
||||
param_set(handle, &tim_config);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// sync params to IO
|
||||
updateTimerRateGroups();
|
||||
updateFailsafe();
|
||||
updateDisarmed();
|
||||
_first_param_update = false;
|
||||
return;
|
||||
}
|
||||
|
||||
_first_param_update = false;
|
||||
|
||||
// skip update when armed or PWM disabled
|
||||
if (_mixing_output.armed().armed || _class_instance == -1 || _mixing_output.useDynamicMixing()) {
|
||||
return;
|
||||
|
||||
@@ -61,14 +61,6 @@ bool GHSTTelemetry::update(const hrt_abstime &now)
|
||||
success = send_battery_status();
|
||||
break;
|
||||
|
||||
case 1U:
|
||||
success = send_gps1_status();
|
||||
break;
|
||||
|
||||
case 2U:
|
||||
success = send_gps2_status();
|
||||
break;
|
||||
|
||||
default:
|
||||
success = false;
|
||||
break;
|
||||
@@ -101,39 +93,3 @@ bool GHSTTelemetry::send_battery_status()
|
||||
|
||||
return success;
|
||||
}
|
||||
|
||||
bool GHSTTelemetry::send_gps1_status()
|
||||
{
|
||||
sensor_gps_s vehicle_gps_position;
|
||||
|
||||
if (!_vehicle_gps_position_sub.update(&vehicle_gps_position)) {
|
||||
return false;
|
||||
}
|
||||
|
||||
int32_t latitude = vehicle_gps_position.lat; // 1e-7 degrees
|
||||
int32_t longitude = vehicle_gps_position.lon; // 1e-7 degrees
|
||||
uint16_t altitude = vehicle_gps_position.alt / 1000; // mm -> m
|
||||
|
||||
return ghst_send_telemetry_gps1_status(_uart_fd, latitude, longitude, altitude);
|
||||
}
|
||||
|
||||
bool GHSTTelemetry::send_gps2_status()
|
||||
{
|
||||
sensor_gps_s vehicle_gps_position;
|
||||
|
||||
if (!_vehicle_gps_position_sub.update(&vehicle_gps_position)) {
|
||||
return false;
|
||||
}
|
||||
|
||||
uint16_t ground_speed = (uint16_t)(vehicle_gps_position.vel_d_m_s / 3.6f * 10.f);
|
||||
uint16_t ground_course = (uint16_t)(math::degrees(vehicle_gps_position.cog_rad) * 100.f);
|
||||
uint8_t num_sats = vehicle_gps_position.satellites_used;
|
||||
|
||||
// TBD: Can these be computed in a RC telemetry driver?
|
||||
uint16_t home_dist = 0;
|
||||
uint16_t home_dir = 0;
|
||||
uint8_t flags = 0;
|
||||
|
||||
return ghst_send_telemetry_gps2_status(_uart_fd, ground_speed, ground_course, num_sats, home_dist, home_dir, flags);
|
||||
}
|
||||
|
||||
|
||||
@@ -44,7 +44,6 @@
|
||||
|
||||
#include <uORB/Subscription.hpp>
|
||||
#include <uORB/topics/battery_status.h>
|
||||
#include <uORB/topics/sensor_gps.h>
|
||||
#include <drivers/drv_hrt.h>
|
||||
|
||||
/**
|
||||
@@ -70,17 +69,14 @@ public:
|
||||
|
||||
private:
|
||||
bool send_battery_status();
|
||||
bool send_gps1_status();
|
||||
bool send_gps2_status();
|
||||
|
||||
uORB::Subscription _vehicle_gps_position_sub{ORB_ID(vehicle_gps_position)};
|
||||
uORB::Subscription _battery_status_sub{ORB_ID(battery_status)};
|
||||
|
||||
int _uart_fd;
|
||||
hrt_abstime _last_update {0U};
|
||||
uint32_t _next_type {0U};
|
||||
|
||||
static constexpr uint32_t NUM_DATA_TYPES {3U}; // number of different telemetry data types
|
||||
static constexpr uint32_t NUM_DATA_TYPES {1U}; // number of different telemetry data types
|
||||
static constexpr uint32_t UPDATE_RATE_HZ {10U}; // update rate [Hz]
|
||||
|
||||
// Factors that should be applied to get correct values
|
||||
|
||||
@@ -193,9 +193,6 @@ public:
|
||||
uint16_t &minValue(int index) { return _min_value[index]; }
|
||||
uint16_t &maxValue(int index) { return _max_value[index]; }
|
||||
|
||||
param_t functionParamHandle(int index) const { return _param_handles[index].function; }
|
||||
param_t disarmedParamHandle(int index) const { return _param_handles[index].disarmed; }
|
||||
|
||||
/**
|
||||
* Returns the actual failsafe value taking into account the assigned function
|
||||
*/
|
||||
|
||||
@@ -350,19 +350,6 @@ static inline void write_uint16_t(uint8_t *buf, int &offset, uint16_t value)
|
||||
offset += 2;
|
||||
}
|
||||
|
||||
/**
|
||||
* write an uint32_t value to a buffer at a given offset and increment the offset
|
||||
*/
|
||||
static inline void write_uint32_t(uint8_t *buf, int &offset, uint32_t value)
|
||||
{
|
||||
// Little Endian
|
||||
buf[offset] = value & 0xFFU;
|
||||
buf[offset + 1] = (value & 0xFF00) >> 8U;
|
||||
buf[offset + 2] = (value & 0xFF0000) >> 16U;
|
||||
buf[offset + 3] = (value & 0xFF000000) >> 24U;
|
||||
offset += 4;
|
||||
}
|
||||
|
||||
/**
|
||||
* write frame header
|
||||
*/
|
||||
@@ -398,34 +385,3 @@ bool ghst_send_telemetry_battery_status(int uart_fd, uint16_t voltage_in_10mV,
|
||||
|
||||
return write(uart_fd, buf, offset) == offset;
|
||||
}
|
||||
|
||||
bool ghst_send_telemetry_gps1_status(int uart_fd, uint32_t latitude, uint32_t longitude, uint16_t altitude)
|
||||
{
|
||||
uint8_t buf[GHST_FRAME_PAYLOAD_SIZE_TELEMETRY + 4U]; // address, frame length, type, crc
|
||||
int offset = 0;
|
||||
write_frame_header(buf, offset, ghstTelemetryType::gpsPrimary, GHST_FRAME_PAYLOAD_SIZE_TELEMETRY);
|
||||
write_uint32_t(buf, offset, latitude);
|
||||
write_uint32_t(buf, offset, longitude);
|
||||
write_uint16_t(buf, offset, altitude);
|
||||
write_frame_crc(buf, offset, sizeof(buf));
|
||||
|
||||
return write(uart_fd, buf, offset) == offset;
|
||||
}
|
||||
|
||||
bool ghst_send_telemetry_gps2_status(int uart_fd, uint16_t ground_speed, uint16_t ground_course, uint8_t numSats,
|
||||
uint16_t home_dist, uint16_t home_dir, uint8_t flags)
|
||||
{
|
||||
uint8_t buf[GHST_FRAME_PAYLOAD_SIZE_TELEMETRY + 4U]; // address, frame length, type, crc
|
||||
int offset = 0;
|
||||
write_frame_header(buf, offset, ghstTelemetryType::gpsSecondary, GHST_FRAME_PAYLOAD_SIZE_TELEMETRY);
|
||||
write_uint16_t(buf, offset, ground_speed);
|
||||
write_uint16_t(buf, offset, ground_course);
|
||||
write_uint8_t(buf, offset, numSats);
|
||||
write_uint16_t(buf, offset, home_dist);
|
||||
write_uint16_t(buf, offset, home_dir);
|
||||
write_uint8_t(buf, offset, flags);
|
||||
write_frame_crc(buf, offset, sizeof(buf));
|
||||
|
||||
return write(uart_fd, buf, offset) == offset;
|
||||
}
|
||||
|
||||
|
||||
+1
-26
@@ -64,9 +64,7 @@ enum class ghstFrameType {
|
||||
};
|
||||
|
||||
enum class ghstTelemetryType {
|
||||
batteryPack = 0x23, // battery pack status frame type
|
||||
gpsPrimary = 0x25, // GPS primary data (lat/long/alt)
|
||||
gpsSecondary = 0x26 // GPS secondary data (course, dist, flags)
|
||||
batteryPack = 0x23 // battery pack status frame type
|
||||
};
|
||||
|
||||
struct ghst_frame_header_t {
|
||||
@@ -141,27 +139,4 @@ __EXPORT bool ghst_parse(const uint64_t now, const uint8_t *frame, unsigned len,
|
||||
__EXPORT bool ghst_send_telemetry_battery_status(int uart_fd, uint16_t voltage_in_10mV,
|
||||
uint16_t current_in_10mA, uint16_t fuel_in_10mAh);
|
||||
|
||||
/**
|
||||
* Send primary GPS information
|
||||
* @param uart_fd UART file descriptor
|
||||
* @param latitude GPS latitude [1e-7 degrees]
|
||||
* @param longitude GPS longitude [1e-7 degrees]
|
||||
* @param altitude GPS altitude [1m]
|
||||
* @return true on success
|
||||
*/
|
||||
__EXPORT bool ghst_send_telemetry_gps1_status(int uart_fd, uint32_t latitude, uint32_t longitude, uint16_t altitude);
|
||||
|
||||
/**
|
||||
* Send secondary GPS information
|
||||
* @param uart_fd UART file descriptor
|
||||
* @param ground_speed Ground Speed [1 km/h]
|
||||
* @param ground_course Ground Course [1e-7 degrees]
|
||||
* @param num_sats GPS Satellite count
|
||||
* @param home_dist Distance to Home [10 m]
|
||||
* @param home_dir Direction to Home [1e-7 degrees]
|
||||
* @param flags GPS Flags
|
||||
* @return true on success
|
||||
*/
|
||||
__EXPORT bool ghst_send_telemetry_gps2_status(int uart_fd, uint16_t ground_speed, uint16_t ground_course,
|
||||
uint8_t num_sats, uint16_t home_dist, uint16_t home_dir, uint8_t flags);
|
||||
__END_DECLS
|
||||
|
||||
@@ -79,7 +79,7 @@ if validate:
|
||||
print(" v1.9.0-beta1")
|
||||
print(" v1.9.0-1.0.0")
|
||||
print(" v1.9.0-1.0.0-alpha2")
|
||||
print("See also https://docs.px4.io/main/en/dev_setup/building_px4.html#building-for-nuttx")
|
||||
print("See also https://dev.px4.io/master/en/setup/building_px4.html#firmware_version")
|
||||
print("")
|
||||
sys.exit(1)
|
||||
|
||||
|
||||
@@ -39,48 +39,51 @@
|
||||
#include "WindEstimator.hpp"
|
||||
|
||||
bool
|
||||
WindEstimator::initialise(const matrix::Vector3f &velI, const float hor_vel_variance, const float heading_rad,
|
||||
const float tas_meas, const float tas_variance)
|
||||
WindEstimator::initialise(const matrix::Vector3f &velI, const matrix::Vector2f &velIvar, const float tas_meas,
|
||||
const matrix::Quatf &q_att)
|
||||
{
|
||||
if (PX4_ISFINITE(tas_meas) && PX4_ISFINITE(tas_variance)) {
|
||||
|
||||
const float cos_heading = cosf(heading_rad);
|
||||
const float sin_heading = sinf(heading_rad);
|
||||
|
||||
// initialise wind states assuming zero side slip and horizontal flight
|
||||
_state(INDEX_W_N) = velI(0) - tas_meas * cos_heading;
|
||||
_state(INDEX_W_E) = velI(1) - tas_meas * sin_heading;
|
||||
_state(INDEX_TAS_SCALE) = _scale_init;
|
||||
|
||||
constexpr float initial_sideslip_uncertainty = math::radians(INITIAL_BETA_ERROR_DEG);
|
||||
const float initial_wind_var_body_y = sq(tas_meas * sinf(initial_sideslip_uncertainty));
|
||||
constexpr float heading_variance = sq(math::radians(INITIAL_HEADING_ERROR_DEG));
|
||||
|
||||
// rotate wind velocity into earth frame aligned with vehicle yaw
|
||||
const float Wx = _state(INDEX_W_N) * cos_heading + _state(INDEX_W_E) * sin_heading;
|
||||
const float Wy = -_state(INDEX_W_N) * sin_heading + _state(INDEX_W_E) * cos_heading;
|
||||
|
||||
_P(INDEX_W_N, INDEX_W_N) = tas_variance * sq(cos_heading) + heading_variance * sq(-Wx * sin_heading - Wy * cos_heading)
|
||||
+ initial_wind_var_body_y * sq(sin_heading);
|
||||
_P(INDEX_W_N, INDEX_W_E) = tas_variance * sin_heading * cos_heading + heading_variance *
|
||||
(-Wx * sin_heading - Wy * cos_heading) * (Wx * cos_heading - Wy * sin_heading) -
|
||||
initial_wind_var_body_y * sin_heading * cos_heading;
|
||||
_P(INDEX_W_E, INDEX_W_N) = _P(INDEX_W_N, INDEX_W_E);
|
||||
_P(INDEX_W_E, INDEX_W_E) = tas_variance * sq(sin_heading) + heading_variance * sq(Wx * cos_heading - Wy * sin_heading) +
|
||||
initial_wind_var_body_y * sq(cos_heading);
|
||||
|
||||
// Now add the variance due to uncertainty in vehicle velocity that was used to calculate the initial wind speed
|
||||
_P(INDEX_W_N, INDEX_W_N) += hor_vel_variance;
|
||||
_P(INDEX_W_E, INDEX_W_E) += hor_vel_variance;
|
||||
|
||||
} else {
|
||||
// no airspeed available
|
||||
_state.setZero();
|
||||
_state(INDEX_TAS_SCALE) = 1.0f;
|
||||
_P.setZero();
|
||||
_P(INDEX_W_N, INDEX_W_N) = _P(INDEX_W_E, INDEX_W_E) = sq(INITIAL_WIND_ERROR);
|
||||
// do no initialise if ground velocity is low
|
||||
// this should prevent the filter from initialising on the ground
|
||||
if (sqrtf(velI(0) * velI(0) + velI(1) * velI(1)) < 3.0f) {
|
||||
return false;
|
||||
}
|
||||
|
||||
const float v_n = velI(0);
|
||||
const float v_e = velI(1);
|
||||
|
||||
const float heading_est = matrix::Eulerf(q_att).psi();
|
||||
|
||||
// initilaise wind states assuming zero side slip and horizontal flight
|
||||
_state(INDEX_W_N) = velI(INDEX_W_N) - tas_meas * cosf(heading_est);
|
||||
_state(INDEX_W_E) = velI(INDEX_W_E) - tas_meas * sinf(heading_est);
|
||||
_state(INDEX_TAS_SCALE) = _scale_init;
|
||||
|
||||
// compute jacobian of states wrt north/each earth velocity states and true airspeed measurement
|
||||
float L0 = v_e * v_e;
|
||||
float L1 = v_n * v_n;
|
||||
float L2 = L0 + L1;
|
||||
float L3 = tas_meas / (L2 * sqrtf(L2));
|
||||
float L4 = L3 * v_e * v_n + 1.0f;
|
||||
float L5 = 1.0f / sqrtf(L2);
|
||||
float L6 = -L5 * tas_meas;
|
||||
|
||||
matrix::Matrix3f L;
|
||||
L.setZero();
|
||||
L(0, 0) = L4;
|
||||
L(0, 1) = L0 * L3 + L6;
|
||||
L(1, 0) = L1 * L3 + L6;
|
||||
L(1, 1) = L4;
|
||||
L(2, 2) = 1.0f;
|
||||
|
||||
// get an estimate of the state covariance matrix given the estimated variance of ground velocity
|
||||
// and measured airspeed
|
||||
_P.setZero();
|
||||
_P(INDEX_W_N, INDEX_W_N) = velIvar(0);
|
||||
_P(INDEX_W_E, INDEX_W_E) = velIvar(1);
|
||||
_P(INDEX_TAS_SCALE, INDEX_TAS_SCALE) = 0.0001f;
|
||||
|
||||
_P = L * _P * L.transpose();
|
||||
|
||||
// reset the timestamp for measurement rejection
|
||||
_time_rejected_tas = 0;
|
||||
_time_rejected_beta = 0;
|
||||
@@ -121,12 +124,13 @@ WindEstimator::update(uint64_t time_now)
|
||||
|
||||
void
|
||||
WindEstimator::fuse_airspeed(uint64_t time_now, const float true_airspeed, const matrix::Vector3f &velI,
|
||||
const float hor_vel_variance, const matrix::Quatf &q_att)
|
||||
const matrix::Vector2f &velIvar, const matrix::Quatf &q_att)
|
||||
{
|
||||
matrix::Vector2f velIvar_constrained = { math::max(0.01f, velIvar(0)), math::max(0.01f, velIvar(1)) };
|
||||
|
||||
if (!_initialised) {
|
||||
// try to initialise
|
||||
_initialised = initialise(velI, hor_vel_variance, matrix::Eulerf(q_att).psi(), true_airspeed, _tas_var);
|
||||
_initialised = initialise(velI, velIvar_constrained, true_airspeed, q_att);
|
||||
return;
|
||||
}
|
||||
|
||||
@@ -153,7 +157,7 @@ WindEstimator::fuse_airspeed(uint64_t time_now, const float true_airspeed, const
|
||||
if (meas_is_rejected || _tas_innov_var < 0.f) {
|
||||
// only reset filter if _tas_innov_var gets unfeasible
|
||||
if (_tas_innov_var < 0.0f) {
|
||||
_initialised = initialise(velI, hor_vel_variance, matrix::Eulerf(q_att).psi(), true_airspeed, _tas_var);
|
||||
_initialised = initialise(velI, matrix::Vector2f(0.1f, 0.1f), true_airspeed, q_att);
|
||||
}
|
||||
|
||||
// we either did a filter reset or the current measurement was rejected so do not fuse
|
||||
@@ -172,11 +176,10 @@ WindEstimator::fuse_airspeed(uint64_t time_now, const float true_airspeed, const
|
||||
}
|
||||
|
||||
void
|
||||
WindEstimator::fuse_beta(uint64_t time_now, const matrix::Vector3f &velI, const float hor_vel_variance,
|
||||
const matrix::Quatf &q_att)
|
||||
WindEstimator::fuse_beta(uint64_t time_now, const matrix::Vector3f &velI, const matrix::Quatf &q_att)
|
||||
{
|
||||
if (!_initialised) {
|
||||
_initialised = initialise(velI, hor_vel_variance, matrix::Eulerf(q_att).psi());
|
||||
_initialised = initialise(velI, matrix::Vector2f(0.1f, 0.1f), velI.length(), q_att);
|
||||
return;
|
||||
}
|
||||
|
||||
@@ -248,7 +251,7 @@ WindEstimator::fuse_beta(uint64_t time_now, const matrix::Vector3f &velI, const
|
||||
|
||||
if (meas_is_rejected || reinit_filter) {
|
||||
if (reinit_filter) {
|
||||
_initialised = initialise(velI, hor_vel_variance, matrix::Eulerf(q_att).psi());
|
||||
_initialised = initialise(velI, matrix::Vector2f(0.1f, 0.1f), velI.length(), q_att);
|
||||
}
|
||||
|
||||
// we either did a filter reset or the current measurement was rejected so do not fuse
|
||||
|
||||
@@ -60,9 +60,8 @@ public:
|
||||
void update(uint64_t time_now);
|
||||
|
||||
void fuse_airspeed(uint64_t time_now, float true_airspeed, const matrix::Vector3f &velI,
|
||||
const float hor_vel_variance, const matrix::Quatf &q_att);
|
||||
void fuse_beta(uint64_t time_now, const matrix::Vector3f &velI, const float hor_vel_variance,
|
||||
const matrix::Quatf &q_att);
|
||||
const matrix::Vector2f &velIvar, const matrix::Quatf &q_att);
|
||||
void fuse_beta(uint64_t time_now, const matrix::Vector3f &velI, const matrix::Quatf &q_att);
|
||||
|
||||
bool is_estimate_valid() { return _initialised; }
|
||||
|
||||
@@ -98,13 +97,6 @@ private:
|
||||
INDEX_TAS_SCALE
|
||||
}; ///< enum which can be used to access state.
|
||||
|
||||
static constexpr float INITIAL_WIND_ERROR =
|
||||
2.5f; // initial uncertainty of each wind state when filter is initialised without airspeed [m/s]
|
||||
static constexpr float INITIAL_BETA_ERROR_DEG =
|
||||
15.0f; // sidelip uncertainty used to initialise the filter with a true airspeed measurement [deg]
|
||||
static constexpr float INITIAL_HEADING_ERROR_DEG =
|
||||
10.0f; // heading uncertainty used to initialise the filter with a true airspeed measurement [deg]
|
||||
|
||||
matrix::Vector3f _state{0.f, 0.f, 1.f};
|
||||
matrix::Matrix3f _P; ///< state covariance matrix
|
||||
|
||||
@@ -135,11 +127,8 @@ private:
|
||||
bool _wind_estimator_reset = false; ///< wind estimator was reset in this cycle
|
||||
|
||||
// initialise state and state covariance matrix
|
||||
bool initialise(const matrix::Vector3f &velI, const float hor_vel_variance, const float heading_rad,
|
||||
const float tas_meas = NAN, const float tas_variance = NAN);
|
||||
bool initialise(const matrix::Vector3f &velI, const matrix::Vector2f &velIvar, const float tas_meas,
|
||||
const matrix::Quatf &q_att);
|
||||
|
||||
void run_sanity_checks();
|
||||
|
||||
// return the square of two floating point numbers
|
||||
static constexpr float sq(float var) { return var * var; }
|
||||
};
|
||||
|
||||
@@ -81,11 +81,11 @@ AirspeedValidator::update_wind_estimator(const uint64_t time_now_usec, float air
|
||||
Quatf q(att_q);
|
||||
|
||||
// airspeed fusion (with raw TAS)
|
||||
const float hor_vel_variance = lpos_evh * lpos_evh;
|
||||
_wind_estimator.fuse_airspeed(time_now_usec, airspeed_true_raw, vI, hor_vel_variance, q);
|
||||
const Vector3f vel_var{Dcmf(q) *Vector3f{lpos_evh, lpos_evh, lpos_evv}};
|
||||
_wind_estimator.fuse_airspeed(time_now_usec, airspeed_true_raw, vI, Vector2f{vel_var(0), vel_var(1)}, q);
|
||||
|
||||
// sideslip fusion
|
||||
_wind_estimator.fuse_beta(time_now_usec, vI, hor_vel_variance, q);
|
||||
_wind_estimator.fuse_beta(time_now_usec, vI, q);
|
||||
}
|
||||
}
|
||||
|
||||
@@ -145,9 +145,9 @@ AirspeedValidator::update_CAS_scale_validated(bool lpos_valid, const matrix::Vec
|
||||
// check passes if the average airspeed with the scale applied is closer to groundspeed than without
|
||||
if (fabsf(TAS_to_grounspeed_error_new) < fabsf(TAS_to_grounspeed_error_current)) {
|
||||
|
||||
// constrain the scale update to max 0.05 at a time
|
||||
const float new_scale_constrained = math::constrain(_wind_estimator.get_tas_scale(), _CAS_scale_validated - 0.05f,
|
||||
_CAS_scale_validated + 0.05f);
|
||||
// constrain the scale update to max 0.01 at a time
|
||||
const float new_scale_constrained = math::constrain(_wind_estimator.get_tas_scale(), _CAS_scale_validated - 0.01f,
|
||||
_CAS_scale_validated + 0.01f);
|
||||
|
||||
_CAS_scale_validated = new_scale_constrained;
|
||||
}
|
||||
|
||||
@@ -147,8 +147,8 @@ private:
|
||||
bool _initialized{false}; /**< module initialized*/
|
||||
bool _vehicle_local_position_valid{false}; /**< local position (from GPS) valid */
|
||||
bool _in_takeoff_situation{true}; /**< in takeoff situation (defined as not yet stall speed reached) */
|
||||
float _ground_minus_wind_TAS{NAN}; /**< true airspeed from groundspeed minus windspeed */
|
||||
float _ground_minus_wind_CAS{NAN}; /**< calibrated airspeed from groundspeed minus windspeed */
|
||||
float _ground_minus_wind_TAS{0.0f}; /**< true airspeed from groundspeed minus windspeed */
|
||||
float _ground_minus_wind_CAS{0.0f}; /**< calibrated airspeed from groundspeed minus windspeed */
|
||||
bool _armed_prev{false};
|
||||
|
||||
hrt_abstime _time_last_airspeed_update[MAX_NUM_AIRSPEED_SENSORS] {};
|
||||
@@ -184,8 +184,7 @@ private:
|
||||
(ParamInt<px4::params::ASPD_FS_T_STOP>) _checks_fail_delay, /**< delay to declare airspeed invalid */
|
||||
(ParamInt<px4::params::ASPD_FS_T_START>) _checks_clear_delay, /**< delay to declare airspeed valid again */
|
||||
|
||||
(ParamFloat<px4::params::FW_AIRSPD_STALL>) _param_fw_airspd_stall,
|
||||
(ParamFloat<px4::params::ASPD_WERR_THR>) _param_wind_sigma_max_synth_tas
|
||||
(ParamFloat<px4::params::FW_AIRSPD_STALL>) _param_fw_airspd_stall
|
||||
)
|
||||
|
||||
void init(); /**< initialization of the airspeed validator instances */
|
||||
@@ -374,7 +373,7 @@ AirspeedModule::Run()
|
||||
// takeoff situation is active from start till one of the sensors' IAS or groundspeed_CAS is above stall speed
|
||||
if (_in_takeoff_situation &&
|
||||
(airspeed_raw.indicated_airspeed_m_s > _param_fw_airspd_stall.get() ||
|
||||
(PX4_ISFINITE(_ground_minus_wind_CAS) && _ground_minus_wind_CAS > _param_fw_airspd_stall.get()))) {
|
||||
_ground_minus_wind_CAS > _param_fw_airspd_stall.get())) {
|
||||
_in_takeoff_situation = false;
|
||||
}
|
||||
|
||||
@@ -517,14 +516,11 @@ void AirspeedModule::update_wind_estimator_sideslip()
|
||||
_wind_estimator_sideslip.update(_time_now_usec);
|
||||
|
||||
if (_vehicle_local_position_valid
|
||||
&& _vtol_vehicle_status.vehicle_vtol_state == vtol_vehicle_status_s::VEHICLE_VTOL_STATE_FW &&
|
||||
_vehicle_status.arming_state == vehicle_status_s::ARMING_STATE_ARMED) {
|
||||
&& _vtol_vehicle_status.vehicle_vtol_state == vtol_vehicle_status_s::VEHICLE_VTOL_STATE_FW) {
|
||||
Vector3f vI(_vehicle_local_position.vx, _vehicle_local_position.vy, _vehicle_local_position.vz);
|
||||
Quatf q(_vehicle_attitude.q);
|
||||
|
||||
const float hor_vel_variance = _vehicle_local_position.evh * _vehicle_local_position.evh;
|
||||
|
||||
_wind_estimator_sideslip.fuse_beta(_time_now_usec, vI, hor_vel_variance, q);
|
||||
_wind_estimator_sideslip.fuse_beta(_time_now_usec, vI, q);
|
||||
}
|
||||
|
||||
_wind_estimate_sideslip.timestamp = _time_now_usec;
|
||||
@@ -544,20 +540,13 @@ void AirspeedModule::update_wind_estimator_sideslip()
|
||||
|
||||
void AirspeedModule::update_ground_minus_wind_airspeed()
|
||||
{
|
||||
const float wind_uncertainty = sqrtf(_wind_estimate_sideslip.variance_north + _wind_estimate_sideslip.variance_east);
|
||||
|
||||
if (wind_uncertainty < _param_wind_sigma_max_synth_tas.get()) {
|
||||
// calculate airspeed estimate based on groundspeed-windspeed
|
||||
const float TAS_north = _vehicle_local_position.vx - _wind_estimate_sideslip.windspeed_north;
|
||||
const float TAS_east = _vehicle_local_position.vy - _wind_estimate_sideslip.windspeed_east;
|
||||
const float TAS_down = _vehicle_local_position.vz; // no wind estimate in z
|
||||
_ground_minus_wind_TAS = sqrtf(TAS_north * TAS_north + TAS_east * TAS_east + TAS_down * TAS_down);
|
||||
_ground_minus_wind_CAS = calc_CAS_from_TAS(_ground_minus_wind_TAS, _vehicle_air_data.baro_pressure_pa,
|
||||
_vehicle_air_data.baro_temp_celcius);
|
||||
|
||||
} else {
|
||||
_ground_minus_wind_TAS = _ground_minus_wind_CAS = NAN;
|
||||
}
|
||||
// calculate airspeed estimate based on groundspeed-windspeed to use as fallback
|
||||
const float TAS_north = _vehicle_local_position.vx - _wind_estimate_sideslip.windspeed_north;
|
||||
const float TAS_east = _vehicle_local_position.vy - _wind_estimate_sideslip.windspeed_east;
|
||||
const float TAS_down = _vehicle_local_position.vz; // no wind estimate in z
|
||||
_ground_minus_wind_TAS = sqrtf(TAS_north * TAS_north + TAS_east * TAS_east + TAS_down * TAS_down);
|
||||
_ground_minus_wind_CAS = calc_CAS_from_TAS(_ground_minus_wind_TAS, _vehicle_air_data.baro_pressure_pa,
|
||||
_vehicle_air_data.baro_temp_celcius);
|
||||
}
|
||||
|
||||
|
||||
|
||||
@@ -227,17 +227,3 @@ PARAM_DEFINE_INT32(ASPD_FS_T_STOP, 2);
|
||||
* @max 1000
|
||||
*/
|
||||
PARAM_DEFINE_INT32(ASPD_FS_T_START, -1);
|
||||
|
||||
/**
|
||||
* Horizontal wind uncertainty threshold for synthetic airspeed.
|
||||
*
|
||||
* The synthetic airspeed estimate (from groundspeed and heading) will be declared valid
|
||||
* as soon and as long the horizontal wind uncertainty drops below this value.
|
||||
*
|
||||
* @unit m/s
|
||||
* @min 0.001
|
||||
* @max 5
|
||||
* @decimal 3
|
||||
* @group Airspeed Validator
|
||||
*/
|
||||
PARAM_DEFINE_FLOAT(ASPD_WERR_THR, 0.55f);
|
||||
|
||||
@@ -252,10 +252,10 @@ void AttitudeEstimatorQ::update_motion_capture_odometry()
|
||||
if (_vehicle_mocap_odometry_sub.update(&mocap)) {
|
||||
// validation check for mocap attitude data
|
||||
bool mocap_att_valid = PX4_ISFINITE(mocap.q[0])
|
||||
&& (PX4_ISFINITE(mocap.orientation_variance[0]) ? sqrtf(fmaxf(
|
||||
mocap.orientation_variance[0],
|
||||
fmaxf(mocap.orientation_variance[1],
|
||||
mocap.orientation_variance[2]))) <= _eo_max_std_dev : true);
|
||||
&& (PX4_ISFINITE(mocap.pose_covariance[mocap.COVARIANCE_MATRIX_ROLL_VARIANCE]) ? sqrtf(fmaxf(
|
||||
mocap.pose_covariance[mocap.COVARIANCE_MATRIX_ROLL_VARIANCE],
|
||||
fmaxf(mocap.pose_covariance[mocap.COVARIANCE_MATRIX_PITCH_VARIANCE],
|
||||
mocap.pose_covariance[mocap.COVARIANCE_MATRIX_YAW_VARIANCE]))) <= _eo_max_std_dev : true);
|
||||
|
||||
if (mocap_att_valid) {
|
||||
Dcmf Rmoc = Quatf(mocap.q);
|
||||
@@ -361,10 +361,10 @@ void AttitudeEstimatorQ::update_visual_odometry()
|
||||
if (_vehicle_visual_odometry_sub.update(&vision)) {
|
||||
// validation check for vision attitude data
|
||||
bool vision_att_valid = PX4_ISFINITE(vision.q[0])
|
||||
&& (PX4_ISFINITE(vision.orientation_variance[0]) ? sqrtf(fmaxf(
|
||||
vision.orientation_variance[0],
|
||||
fmaxf(vision.orientation_variance[1],
|
||||
vision.orientation_variance[2]))) <= _eo_max_std_dev : true);
|
||||
&& (PX4_ISFINITE(vision.pose_covariance[vision.COVARIANCE_MATRIX_ROLL_VARIANCE]) ? sqrtf(fmaxf(
|
||||
vision.pose_covariance[vision.COVARIANCE_MATRIX_ROLL_VARIANCE],
|
||||
fmaxf(vision.pose_covariance[vision.COVARIANCE_MATRIX_PITCH_VARIANCE],
|
||||
vision.pose_covariance[vision.COVARIANCE_MATRIX_YAW_VARIANCE]))) <= _eo_max_std_dev : true);
|
||||
|
||||
if (vision_att_valid) {
|
||||
Dcmf Rvis = Quatf(vision.q);
|
||||
|
||||
@@ -48,7 +48,7 @@ bool PreFlightCheck::airframeCheck(orb_advert_t *mavlink_log_pub, const vehicle_
|
||||
// We no longer support VTOL on fmu-v2, so we need to warn existing users.
|
||||
if (status.is_vtol) {
|
||||
mavlink_log_critical(mavlink_log_pub,
|
||||
"VTOL is not supported with fmu-v2, see docs.px4.io/main/en/config/firmware.html#bootloader");
|
||||
"VTOL is not supported with fmu-v2, see docs.px4.io/master/en/config/firmware.html#bootloader");
|
||||
success = false;
|
||||
}
|
||||
|
||||
|
||||
@@ -207,7 +207,7 @@ struct extVisionSample {
|
||||
Vector3f vel{}; ///< FRD velocity in reference frame defined in vel_frame variable (m/sec) - Z must be aligned with down axis
|
||||
Quatf quat{}; ///< quaternion defining rotation from body to earth frame
|
||||
Vector3f posVar{}; ///< XYZ position variances (m**2)
|
||||
Vector3f velVar{}; ///< XYZ velocity variances ((m/sec)**2)
|
||||
Matrix3f velCov{}; ///< XYZ velocity covariances ((m/sec)**2)
|
||||
float angVar{}; ///< angular heading variance (rad**2)
|
||||
VelocityFrame vel_frame = VelocityFrame::BODY_FRAME_FRD;
|
||||
uint8_t reset_counter{};
|
||||
|
||||
@@ -361,41 +361,21 @@ void Ekf::controlExternalVisionFusion()
|
||||
}
|
||||
|
||||
// determine if we should use the yaw observation
|
||||
resetEstimatorAidStatus(_aid_src_ev_yaw);
|
||||
const float measured_hdg = shouldUse321RotationSequence(_R_to_earth) ? getEuler321Yaw(_ev_sample_delayed.quat) : getEuler312Yaw(_ev_sample_delayed.quat);
|
||||
const float ev_yaw_obs_var = fmaxf(_ev_sample_delayed.angVar, 1.e-4f);
|
||||
|
||||
if (PX4_ISFINITE(measured_hdg)) {
|
||||
_aid_src_ev_yaw.timestamp_sample = _ev_sample_delayed.time_us;
|
||||
_aid_src_ev_yaw.observation = measured_hdg;
|
||||
_aid_src_ev_yaw.observation_variance = ev_yaw_obs_var;
|
||||
_aid_src_ev_yaw.fusion_enabled = _control_status.flags.ev_yaw;
|
||||
|
||||
if (_control_status.flags.ev_yaw) {
|
||||
if (reset && _control_status_prev.flags.ev_yaw) {
|
||||
resetYawToEv();
|
||||
}
|
||||
|
||||
const float innovation = wrap_pi(getEulerYaw(_R_to_earth) - measured_hdg);
|
||||
|
||||
fuseYaw(innovation, ev_yaw_obs_var, _aid_src_ev_yaw);
|
||||
|
||||
} else {
|
||||
// populate estimator_aid_src_ev_yaw with delta heading innovations for logging
|
||||
// use the change in yaw since the last measurement
|
||||
const float measured_hdg_prev = shouldUse321RotationSequence(_R_to_earth) ? getEuler321Yaw(_ev_sample_delayed_prev.quat) : getEuler312Yaw(_ev_sample_delayed_prev.quat);
|
||||
|
||||
// calculate the change in yaw since the last measurement
|
||||
const float ev_delta_yaw = wrap_pi(measured_hdg - measured_hdg_prev);
|
||||
|
||||
_aid_src_ev_yaw.innovation = wrap_pi(getEulerYaw(_R_to_earth) - _yaw_pred_prev - ev_delta_yaw);
|
||||
if (_control_status.flags.ev_yaw) {
|
||||
if (reset && _control_status_prev.flags.ev_yaw) {
|
||||
resetYawToEv();
|
||||
}
|
||||
|
||||
float measured_hdg = shouldUse321RotationSequence(_R_to_earth) ? getEuler321Yaw(_ev_sample_delayed.quat) : getEuler312Yaw(_ev_sample_delayed.quat);
|
||||
|
||||
float innovation = wrap_pi(getEulerYaw(_R_to_earth) - measured_hdg);
|
||||
float obs_var = fmaxf(_ev_sample_delayed.angVar, 1.e-4f);
|
||||
fuseYaw(innovation, obs_var);
|
||||
}
|
||||
|
||||
// record observation and estimate for use next time
|
||||
_ev_sample_delayed_prev = _ev_sample_delayed;
|
||||
_hpos_pred_prev = _state.pos.xy();
|
||||
_yaw_pred_prev = getEulerYaw(_state.quat_nominal);
|
||||
|
||||
} else if ((_control_status.flags.ev_pos || _control_status.flags.ev_vel || _control_status.flags.ev_yaw)
|
||||
&& isTimedOut(_time_last_ext_vision, (uint64_t)_params.reset_timeout_max)) {
|
||||
@@ -604,7 +584,7 @@ void Ekf::controlGpsYawFusion(bool gps_checks_passing, bool gps_checks_failing)
|
||||
|
||||
fuseGpsYaw();
|
||||
|
||||
const bool is_fusion_failing = isTimedOut(_aid_src_gnss_yaw.time_last_fuse, _params.reset_timeout_max);
|
||||
const bool is_fusion_failing = isTimedOut(_time_last_gps_yaw_fuse, _params.reset_timeout_max);
|
||||
|
||||
if (is_fusion_failing) {
|
||||
if (_nb_gps_yaw_reset_available > 0) {
|
||||
@@ -1131,13 +1111,18 @@ void Ekf::controlAuxVelFusion()
|
||||
|
||||
if (_auxvel_buffer->pop_first_older_than(_imu_sample_delayed.time_us, &auxvel_sample_delayed)) {
|
||||
|
||||
updateVelocityAidSrcStatus(auxvel_sample_delayed.time_us, auxvel_sample_delayed.vel, auxvel_sample_delayed.velVar, fmaxf(_params.auxvel_gate, 1.f), _aid_src_aux_vel);
|
||||
|
||||
if (isHorizontalAidingActive()) {
|
||||
_aid_src_aux_vel.fusion_enabled[0] = PX4_ISFINITE(auxvel_sample_delayed.vel(0));
|
||||
_aid_src_aux_vel.fusion_enabled[1] = PX4_ISFINITE(auxvel_sample_delayed.vel(1));
|
||||
_aid_src_aux_vel.fusion_enabled[2] = PX4_ISFINITE(auxvel_sample_delayed.vel(2));
|
||||
fuseVelocity(_aid_src_aux_vel);
|
||||
|
||||
const float aux_vel_innov_gate = fmaxf(_params.auxvel_gate, 1.f);
|
||||
|
||||
_aux_vel_innov = _state.vel - auxvel_sample_delayed.vel;
|
||||
|
||||
fuseHorizontalVelocity(_aux_vel_innov, aux_vel_innov_gate, auxvel_sample_delayed.velVar,
|
||||
_aux_vel_innov_var, _aux_vel_test_ratio);
|
||||
|
||||
// Can be enabled after bit for this is added to EKF_AID_MASK
|
||||
// fuseVerticalVelocity(_aux_vel_innov, aux_vel_innov_gate, auxvel_sample_delayed.velVar,
|
||||
// _aux_vel_innov_var, _aux_vel_test_ratio);
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
+27
-94
@@ -96,7 +96,7 @@ public:
|
||||
|
||||
void getAuxVelInnov(float aux_vel_innov[2]) const;
|
||||
void getAuxVelInnovVar(float aux_vel_innov[2]) const;
|
||||
void getAuxVelInnovRatio(float &aux_vel_innov_ratio) const { aux_vel_innov_ratio = Vector3f(_aid_src_aux_vel.test_ratio).max(); }
|
||||
void getAuxVelInnovRatio(float &aux_vel_innov_ratio) const { aux_vel_innov_ratio = _aux_vel_test_ratio(0); }
|
||||
|
||||
void getFlowInnov(float flow_innov[2]) const { _flow_innov.copyTo(flow_innov); }
|
||||
void getFlowInnovVar(float flow_innov_var[2]) const { _flow_innov_var.copyTo(flow_innov_var); }
|
||||
@@ -111,54 +111,13 @@ public:
|
||||
const Vector3f getFlowGyro() const { return _flow_sample_delayed.gyro_xyz * (1.f / _flow_sample_delayed.dt); }
|
||||
const Vector3f &getFlowGyroIntegral() const { return _flow_sample_delayed.gyro_xyz; }
|
||||
|
||||
void getHeadingInnov(float &heading_innov) const {
|
||||
if (_control_status.flags.mag_hdg) {
|
||||
heading_innov = _aid_src_mag_heading.innovation;
|
||||
void getHeadingInnov(float &heading_innov) const { heading_innov = _heading_innov; }
|
||||
void getHeadingInnovVar(float &heading_innov_var) const { heading_innov_var = _heading_innov_var; }
|
||||
void getHeadingInnovRatio(float &heading_innov_ratio) const { heading_innov_ratio = _yaw_test_ratio; }
|
||||
|
||||
} else if (_control_status.flags.mag_3D) {
|
||||
heading_innov = Vector3f(_aid_src_mag.innovation).max();
|
||||
|
||||
} else if (_control_status.flags.gps_yaw) {
|
||||
heading_innov = _aid_src_gnss_yaw.innovation;
|
||||
|
||||
} else if (_control_status.flags.ev_yaw) {
|
||||
heading_innov = _aid_src_ev_yaw.innovation;
|
||||
}
|
||||
}
|
||||
|
||||
void getHeadingInnovVar(float &heading_innov_var) const {
|
||||
if (_control_status.flags.mag_hdg) {
|
||||
heading_innov_var = _aid_src_mag_heading.innovation_variance;
|
||||
|
||||
} else if (_control_status.flags.mag_3D) {
|
||||
heading_innov_var = Vector3f(_aid_src_mag.innovation_variance).max();
|
||||
|
||||
} else if (_control_status.flags.gps_yaw) {
|
||||
heading_innov_var = _aid_src_gnss_yaw.innovation_variance;
|
||||
|
||||
} else if (_control_status.flags.ev_yaw) {
|
||||
heading_innov_var = _aid_src_ev_yaw.innovation_variance;
|
||||
}
|
||||
}
|
||||
|
||||
void getHeadingInnovRatio(float &heading_innov_ratio) const {
|
||||
if (_control_status.flags.mag_hdg) {
|
||||
heading_innov_ratio = _aid_src_mag_heading.test_ratio;
|
||||
|
||||
} else if (_control_status.flags.mag_3D) {
|
||||
heading_innov_ratio = Vector3f(_aid_src_mag.test_ratio).max();
|
||||
|
||||
} else if (_control_status.flags.gps_yaw) {
|
||||
heading_innov_ratio = _aid_src_gnss_yaw.test_ratio;
|
||||
|
||||
} else if (_control_status.flags.ev_yaw) {
|
||||
heading_innov_ratio = _aid_src_ev_yaw.test_ratio;
|
||||
}
|
||||
}
|
||||
|
||||
void getMagInnov(float mag_innov[3]) const { memcpy(mag_innov, _aid_src_mag.innovation, sizeof(_aid_src_mag.innovation)); }
|
||||
void getMagInnovVar(float mag_innov_var[3]) const { memcpy(mag_innov_var, _aid_src_mag.innovation_variance, sizeof(_aid_src_mag.innovation_variance)); }
|
||||
void getMagInnovRatio(float &mag_innov_ratio) const { mag_innov_ratio = Vector3f(_aid_src_mag.test_ratio).max(); }
|
||||
void getMagInnov(float mag_innov[3]) const { _mag_innov.copyTo(mag_innov); }
|
||||
void getMagInnovVar(float mag_innov_var[3]) const { _mag_innov_var.copyTo(mag_innov_var); }
|
||||
void getMagInnovRatio(float &mag_innov_ratio) const { mag_innov_ratio = _mag_test_ratio.max(); }
|
||||
|
||||
void getDragInnov(float drag_innov[2]) const { _drag_innov.copyTo(drag_innov); }
|
||||
void getDragInnovVar(float drag_innov_var[2]) const { _drag_innov_var.copyTo(drag_innov_var); }
|
||||
@@ -201,8 +160,6 @@ public:
|
||||
// get the orientation (quaterion) covariances
|
||||
matrix::SquareMatrix<float, 4> orientation_covariances() const { return P.slice<4, 4>(0, 0); }
|
||||
|
||||
matrix::SquareMatrix<float, 3> orientation_covariances_euler() const;
|
||||
|
||||
// get the linear velocity covariances
|
||||
matrix::SquareMatrix<float, 3> velocity_covariances() const { return P.slice<3, 3>(4, 4); }
|
||||
|
||||
@@ -397,17 +354,9 @@ public:
|
||||
|
||||
const auto &aid_src_fake_pos() const { return _aid_src_fake_pos; }
|
||||
|
||||
const auto &aid_src_ev_yaw() const { return _aid_src_ev_yaw; }
|
||||
|
||||
const auto &aid_src_gnss_yaw() const { return _aid_src_gnss_yaw; }
|
||||
const auto &aid_src_gnss_vel() const { return _aid_src_gnss_vel; }
|
||||
const auto &aid_src_gnss_pos() const { return _aid_src_gnss_pos; }
|
||||
|
||||
const auto &aid_src_mag_heading() const { return _aid_src_mag_heading; }
|
||||
const auto &aid_src_mag() const { return _aid_src_mag; }
|
||||
|
||||
const auto &aid_src_aux_vel() const { return _aid_src_aux_vel; }
|
||||
|
||||
private:
|
||||
|
||||
// set the internal states and status to their default value
|
||||
@@ -442,7 +391,6 @@ private:
|
||||
// variables used when position data is being fused using a relative position odometry model
|
||||
bool _fuse_hpos_as_odom{false}; ///< true when the NE position data is being fused using an odometry assumption
|
||||
Vector2f _hpos_pred_prev{}; ///< previous value of NE position state used by odometry fusion (m)
|
||||
float _yaw_pred_prev{}; ///< previous value of yaw state used by odometry fusion (m)
|
||||
bool _hpos_prev_available{false}; ///< true when previous values of the estimate and measurement are available for use
|
||||
Dcmf _R_ev_to_ekf; ///< transformation matrix that rotates observations from the EV to the EKF navigation frame, initialized with Identity
|
||||
bool _inhibit_ev_yaw_use{false}; ///< true when the vision yaw data should not be used (e.g.: NE fusion requires true North)
|
||||
@@ -470,7 +418,10 @@ private:
|
||||
uint64_t _time_last_flow_terrain_fuse{0}; ///< time the last fusion of optical flow measurements for terrain estimation were performed (uSec)
|
||||
uint64_t _time_last_beta_fuse{0}; ///< time the last fusion of synthetic sideslip measurements were performed (uSec)
|
||||
uint64_t _time_last_zero_velocity_fuse{0}; ///< last time of zero velocity update (uSec)
|
||||
uint64_t _time_last_gps_yaw_fuse{0}; ///< time the last fusion of GPS yaw measurements were performed (uSec)
|
||||
uint64_t _time_last_gps_yaw_data{0}; ///< time the last GPS yaw measurement was available (uSec)
|
||||
uint64_t _time_last_mag_heading_fuse{0};
|
||||
uint64_t _time_last_mag_3d_fuse{0};
|
||||
uint64_t _time_last_healthy_rng_data{0};
|
||||
uint8_t _nb_gps_yaw_reset_available{0}; ///< remaining number of resets allowed before switching to another aiding source
|
||||
|
||||
@@ -516,6 +467,15 @@ private:
|
||||
Vector3f _ev_pos_innov{}; ///< external vision position innovations (m)
|
||||
Vector3f _ev_pos_innov_var{}; ///< external vision position innovation variances (m**2)
|
||||
|
||||
Vector3f _aux_vel_innov{}; ///< horizontal auxiliary velocity innovations: (m/sec)
|
||||
Vector3f _aux_vel_innov_var{}; ///< horizontal auxiliary velocity innovation variances: ((m/sec)**2)
|
||||
|
||||
float _heading_innov{0.0f}; ///< heading measurement innovation (rad)
|
||||
float _heading_innov_var{0.0f}; ///< heading measurement innovation variance (rad**2)
|
||||
|
||||
Vector3f _mag_innov{}; ///< earth magnetic field innovations (Gauss)
|
||||
Vector3f _mag_innov_var{}; ///< earth magnetic field innovation variance (Gauss**2)
|
||||
|
||||
Vector2f _drag_innov{}; ///< multirotor drag measurement innovation (m/sec**2)
|
||||
Vector2f _drag_innov_var{}; ///< multirotor drag measurement innovation variance ((m/sec**2)**2)
|
||||
|
||||
@@ -545,17 +505,9 @@ private:
|
||||
|
||||
estimator_aid_source_2d_s _aid_src_fake_pos{};
|
||||
|
||||
estimator_aid_source_1d_s _aid_src_ev_yaw{};
|
||||
|
||||
estimator_aid_source_1d_s _aid_src_gnss_yaw{};
|
||||
estimator_aid_source_3d_s _aid_src_gnss_vel{};
|
||||
estimator_aid_source_3d_s _aid_src_gnss_pos{};
|
||||
|
||||
estimator_aid_source_1d_s _aid_src_mag_heading{};
|
||||
estimator_aid_source_3d_s _aid_src_mag{};
|
||||
|
||||
estimator_aid_source_3d_s _aid_src_aux_vel{};
|
||||
|
||||
// output predictor states
|
||||
Vector3f _delta_angle_corr{}; ///< delta angle correction vector (rad)
|
||||
Vector3f _vel_err_integ{}; ///< integral of velocity tracking error (m)
|
||||
@@ -654,12 +606,12 @@ private:
|
||||
void predictCovariance();
|
||||
|
||||
// ekf sequential fusion of magnetometer measurements
|
||||
bool fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, bool update_all_states = true);
|
||||
bool fuseMag(const Vector3f &mag, bool update_all_states = true);
|
||||
|
||||
// update quaternion states and covariances using an innovation, observation variance and Jacobian vector
|
||||
// innovation : prediction - measurement
|
||||
// variance : observaton variance
|
||||
bool fuseYaw(const float innovation, const float variance, estimator_aid_source_1d_s& aid_src_status);
|
||||
bool fuseYaw(const float innovation, const float variance);
|
||||
|
||||
// fuse the yaw angle obtained from a dual antenna GPS unit
|
||||
void fuseGpsYaw();
|
||||
@@ -722,12 +674,6 @@ private:
|
||||
// fuse optical flow line of sight rate measurements
|
||||
void fuseOptFlow();
|
||||
|
||||
void updateVelocityAidSrcStatus(const uint64_t& sample_time_us, const Vector3f& velocity, const Vector3f& obs_var, const float innov_gate, estimator_aid_source_3d_s& vel_aid_src) const;
|
||||
void updatePositionAidSrcStatus(const uint64_t& sample_time_us, const Vector3f& position, const Vector3f& obs_var, const float innov_gate, estimator_aid_source_3d_s& pos_aid_src) const;
|
||||
|
||||
void fuseVelocity(estimator_aid_source_3d_s& vel_aid_src);
|
||||
void fusePosition(estimator_aid_source_3d_s& pos_aid_src);
|
||||
|
||||
bool fuseHorizontalVelocity(const Vector3f &innov, float innov_gate, const Vector3f &obs_var,
|
||||
Vector3f &innov_var, Vector2f &test_ratio);
|
||||
|
||||
@@ -740,11 +686,10 @@ private:
|
||||
bool fuseVerticalPosition(float innov, float innov_gate, float obs_var,
|
||||
float &innov_var, float &test_ratio);
|
||||
|
||||
void updateGpsYaw(const gpsSample &gps_sample);
|
||||
void updateGpsVel(const gpsSample &gps_sample);
|
||||
void updateGpsPos(const gpsSample &gps_sample);
|
||||
|
||||
void fuseGpsVel();
|
||||
|
||||
void updateGpsPos(const gpsSample &gps_sample);
|
||||
void fuseGpsPos();
|
||||
|
||||
// calculate optical flow body angular rate compensation
|
||||
@@ -1166,28 +1111,16 @@ private:
|
||||
|
||||
void setEstimatorAidStatusTestRatio(estimator_aid_source_1d_s &status, float innovation_gate) const
|
||||
{
|
||||
if (PX4_ISFINITE(status.innovation) && PX4_ISFINITE(status.innovation_variance)) {
|
||||
status.test_ratio = sq(status.innovation) / (sq(innovation_gate) * status.innovation_variance);
|
||||
status.innovation_rejected = (status.test_ratio > 1.f);
|
||||
|
||||
} else {
|
||||
status.test_ratio = INFINITY;
|
||||
status.innovation_rejected = true;
|
||||
}
|
||||
status.test_ratio = sq(status.innovation) / (sq(innovation_gate) * status.innovation_variance);
|
||||
status.innovation_rejected = (status.test_ratio > 1.f);
|
||||
}
|
||||
|
||||
template <typename T>
|
||||
void setEstimatorAidStatusTestRatio(T &status, float innovation_gate) const
|
||||
{
|
||||
for (size_t i = 0; i < (sizeof(status.test_ratio) / sizeof(status.test_ratio[0])); i++) {
|
||||
if (PX4_ISFINITE(status.innovation[i]) && PX4_ISFINITE(status.innovation_variance[i])) {
|
||||
status.test_ratio[i] = sq(status.innovation[i]) / (sq(innovation_gate) * status.innovation_variance[i]);
|
||||
status.innovation_rejected[i] = (status.test_ratio[i] > 1.f);
|
||||
|
||||
} else {
|
||||
status.test_ratio[i] = INFINITY;
|
||||
status.innovation_rejected[i] = true;
|
||||
}
|
||||
status.test_ratio[i] = sq(status.innovation[i]) / (sq(innovation_gate) * status.innovation_variance[i]);
|
||||
status.innovation_rejected[i] = (status.test_ratio[i] > 1.f);
|
||||
}
|
||||
}
|
||||
};
|
||||
|
||||
@@ -657,14 +657,14 @@ void Ekf::getEvVelPosInnovRatio(float &hvel, float &vvel, float &hpos, float &vp
|
||||
|
||||
void Ekf::getAuxVelInnov(float aux_vel_innov[2]) const
|
||||
{
|
||||
aux_vel_innov[0] = _aid_src_aux_vel.innovation[0];
|
||||
aux_vel_innov[1] = _aid_src_aux_vel.innovation[1];
|
||||
aux_vel_innov[0] = _aux_vel_innov(0);
|
||||
aux_vel_innov[1] = _aux_vel_innov(1);
|
||||
}
|
||||
|
||||
void Ekf::getAuxVelInnovVar(float aux_vel_innov_var[2]) const
|
||||
{
|
||||
aux_vel_innov_var[0] = _aid_src_aux_vel.innovation_variance[0];
|
||||
aux_vel_innov_var[1] = _aid_src_aux_vel.innovation_variance[1];
|
||||
aux_vel_innov_var[0] = _aux_vel_innov_var(0);
|
||||
aux_vel_innov_var[1] = _aux_vel_innov_var(1);
|
||||
}
|
||||
|
||||
// get the state vector at the delayed time horizon
|
||||
@@ -733,9 +733,9 @@ bool Ekf::setEkfGlobalOrigin(const double latitude, const double longitude, cons
|
||||
|
||||
resetVerticalPositionTo(_gps_alt_ref - current_alt);
|
||||
|
||||
_baro_hgt_offset += _state_reset_status.posD_change;
|
||||
_baro_hgt_offset -= _state_reset_status.posD_change;
|
||||
|
||||
_rng_hgt_offset += _state_reset_status.posD_change;
|
||||
_rng_hgt_offset -= _state_reset_status.posD_change;
|
||||
_ev_hgt_offset -= _state_reset_status.posD_change;
|
||||
}
|
||||
|
||||
@@ -931,17 +931,7 @@ void Ekf::get_innovation_test_status(uint16_t &status, float &mag, float &vel, f
|
||||
status = _innov_check_fail_status.value;
|
||||
|
||||
// return the largest magnetometer innovation test ratio
|
||||
if (_control_status.flags.mag_hdg) {
|
||||
mag = sqrtf(_aid_src_mag_heading.test_ratio);
|
||||
|
||||
} else if (_control_status.flags.mag_3D) {
|
||||
mag = sqrtf(Vector3f(_aid_src_mag.test_ratio).max());
|
||||
|
||||
} else if (_control_status.flags.gps_yaw) {
|
||||
mag = sqrtf(_aid_src_gnss_yaw.test_ratio);
|
||||
} else {
|
||||
mag = NAN;
|
||||
}
|
||||
mag = sqrtf(math::max(_yaw_test_ratio, _mag_test_ratio.max()));
|
||||
|
||||
// return the largest velocity and position innovation test ratio
|
||||
vel = NAN;
|
||||
@@ -1012,23 +1002,9 @@ void Ekf::get_ekf_soln_status(uint16_t *status) const
|
||||
soln_status.flags.const_pos_mode = !soln_status.flags.velocity_horiz;
|
||||
soln_status.flags.pred_pos_horiz_rel = soln_status.flags.pos_horiz_rel;
|
||||
soln_status.flags.pred_pos_horiz_abs = soln_status.flags.pos_horiz_abs;
|
||||
|
||||
bool mag_innov_good = true;
|
||||
|
||||
if (_control_status.flags.mag_hdg) {
|
||||
if (_aid_src_mag_heading.test_ratio < 1.f) {
|
||||
mag_innov_good = false;
|
||||
}
|
||||
|
||||
} else if (_control_status.flags.mag_3D) {
|
||||
if (Vector3f(_aid_src_mag.test_ratio).max() < 1.f) {
|
||||
mag_innov_good = false;
|
||||
}
|
||||
}
|
||||
|
||||
const bool gps_vel_innov_bad = Vector3f(_aid_src_gnss_vel.test_ratio).max() > 1.f;
|
||||
const bool gps_pos_innov_bad = Vector2f(_aid_src_gnss_pos.test_ratio).max() > 1.f;
|
||||
|
||||
const bool mag_innov_good = (_mag_test_ratio.max() < 1.0f) && (_yaw_test_ratio < 1.0f);
|
||||
soln_status.flags.gps_glitch = (gps_vel_innov_bad || gps_pos_innov_bad) && mag_innov_good;
|
||||
soln_status.flags.accel_error = _fault_status.flags.bad_acc_vertical;
|
||||
*status = soln_status.value;
|
||||
@@ -1284,6 +1260,10 @@ void Ekf::stopMag3DFusion()
|
||||
_control_status.flags.mag_3D = false;
|
||||
_control_status.flags.mag_dec = false;
|
||||
|
||||
_mag_innov.zero();
|
||||
_mag_innov_var.zero();
|
||||
_mag_test_ratio.zero();
|
||||
|
||||
_fault_status.flags.bad_mag_x = false;
|
||||
_fault_status.flags.bad_mag_y = false;
|
||||
_fault_status.flags.bad_mag_z = false;
|
||||
@@ -1298,6 +1278,8 @@ void Ekf::stopMagHdgFusion()
|
||||
_control_status.flags.mag_hdg = false;
|
||||
|
||||
_fault_status.flags.bad_hdg = false;
|
||||
|
||||
_yaw_test_ratio = 0.f;
|
||||
}
|
||||
}
|
||||
|
||||
@@ -1316,6 +1298,8 @@ void Ekf::startMag3DFusion()
|
||||
|
||||
stopMagHdgFusion();
|
||||
|
||||
_yaw_test_ratio = 0.0f;
|
||||
|
||||
zeroMagCov();
|
||||
loadMagCovData();
|
||||
_control_status.flags.mag_3D = true;
|
||||
@@ -1508,7 +1492,7 @@ Vector3f Ekf::getVisionVelocityInEkfFrame() const
|
||||
|
||||
Vector3f Ekf::getVisionVelocityVarianceInEkfFrame() const
|
||||
{
|
||||
Matrix3f ev_vel_cov = matrix::diag(_ev_sample_delayed.velVar);
|
||||
Matrix3f ev_vel_cov = _ev_sample_delayed.velCov;
|
||||
|
||||
// rotate measurement into correct earth frame if required
|
||||
switch (_ev_sample_delayed.vel_frame) {
|
||||
@@ -1695,7 +1679,6 @@ void Ekf::stopGpsYawFusion()
|
||||
if (_control_status.flags.gps_yaw) {
|
||||
ECL_INFO("stopping GPS yaw fusion");
|
||||
_control_status.flags.gps_yaw = false;
|
||||
resetEstimatorAidStatus(_aid_src_gnss_yaw);
|
||||
}
|
||||
}
|
||||
|
||||
@@ -1761,9 +1744,9 @@ void Ekf::stopEvYawFusion()
|
||||
|
||||
void Ekf::stopAuxVelFusion()
|
||||
{
|
||||
ECL_INFO("stopping aux vel fusion");
|
||||
//_control_status.flags.aux_vel = false;
|
||||
resetEstimatorAidStatus(_aid_src_aux_vel);
|
||||
_aux_vel_innov.setZero();
|
||||
_aux_vel_innov_var.setZero();
|
||||
_aux_vel_test_ratio.setZero();
|
||||
}
|
||||
|
||||
void Ekf::stopFlowFusion()
|
||||
@@ -1903,60 +1886,3 @@ void Ekf::resetGpsDriftCheckFilters()
|
||||
_gps_vertical_position_drift_rate_m_s = NAN;
|
||||
_gps_filtered_horizontal_velocity_m_s = NAN;
|
||||
}
|
||||
|
||||
matrix::SquareMatrix<float, 3> Ekf::orientation_covariances_euler() const
|
||||
{
|
||||
// Jacobian matrix (3x4) containing the partial derivatives of the
|
||||
// Euler angle equations with respect to the quaternions
|
||||
matrix::Matrix<float, 3, 4> G;
|
||||
|
||||
// quaternion components
|
||||
float q1 = _state.quat_nominal(0);
|
||||
float q2 = _state.quat_nominal(1);
|
||||
float q3 = _state.quat_nominal(2);
|
||||
float q4 = _state.quat_nominal(3);
|
||||
|
||||
// numerator components
|
||||
float n1 = 2 * q1 * q2 + 2 * q2 * q4;
|
||||
float n2 = -2 * q2 * q2 - 2 * q3 * q3 + 1;
|
||||
float n3 = 2 * q1 * q4 + 2 * q2 * q3;
|
||||
float n4 = -2 * q3 * q3 - 2 * q4 * q4 + 1;
|
||||
float n5 = 2 * q1 * q3 + 2 * q2 * q4;
|
||||
float n6 = -2 * q1 * q2 - 2 * q2 * q4;
|
||||
float n7 = -2 * q1 * q4 - 2 * q2 * q3;
|
||||
|
||||
// Protect against division by 0
|
||||
float d1 = n1 * n1 + n2 * n2;
|
||||
float d2 = n3 * n3 + n4 * n4;
|
||||
|
||||
if (fabsf(d1) < FLT_EPSILON) {
|
||||
d1 = FLT_EPSILON;
|
||||
}
|
||||
|
||||
if (fabsf(d2) < FLT_EPSILON) {
|
||||
d2 = FLT_EPSILON;
|
||||
}
|
||||
|
||||
// Protect against square root of negative numbers
|
||||
float x = math::max(-n5 * n5 + 1, 0.0f);
|
||||
|
||||
// compute G matrix
|
||||
float sqrt_x = sqrtf(x);
|
||||
float g00_03 = 2 * q2 * n2 / d1;
|
||||
G(0, 0) = g00_03;
|
||||
G(0, 1) = -4 * q2 * n6 / d1 + (2 * q1 + 2 * q4) * n2 / d1;
|
||||
G(0, 2) = -4 * q3 * n6 / d1;
|
||||
G(0, 3) = g00_03;
|
||||
G(1, 0) = 2 * q3 / sqrt_x;
|
||||
G(1, 1) = 2 * q4 / sqrt_x;
|
||||
G(1, 2) = 2 * q1 / sqrt_x;
|
||||
G(1, 3) = 2 * q2 / sqrt_x;
|
||||
G(2, 0) = 2 * q4 * n4 / d2;
|
||||
G(2, 1) = 2 * q3 * n4 / d2;
|
||||
G(2, 2) = 2 * q2 * n4 / d2 - 4 * q3 * n7 / d2;
|
||||
G(2, 3) = 2 * q1 * n4 / d2 - 4 * q4 * n7 / d2;
|
||||
|
||||
const matrix::SquareMatrix<float, 4> quat_covariances = P.slice<4, 4>(0, 0);
|
||||
|
||||
return G * quat_covariances * G.transpose();
|
||||
}
|
||||
|
||||
@@ -245,8 +245,6 @@ public:
|
||||
|
||||
// Getters for samples on the delayed time horizon
|
||||
const imuSample &get_imu_sample_delayed() const { return _imu_sample_delayed; }
|
||||
const imuSample &get_imu_sample_newest() const { return _newest_high_rate_imu_sample; }
|
||||
|
||||
const baroSample &get_baro_sample_delayed() const { return _baro_sample_delayed; }
|
||||
const gpsSample &get_gps_sample_delayed() const { return _gps_sample_delayed; }
|
||||
|
||||
@@ -330,9 +328,12 @@ protected:
|
||||
float _gps_yaw_offset{0.0f}; // Yaw offset angle for dual GPS antennas used for yaw estimation (radians).
|
||||
|
||||
// innovation consistency check monitoring ratios
|
||||
AlphaFilter<float> _gnss_yaw_signed_test_ratio_lpf{0.1f}; // average signed test ratio used to detect a bias in the state
|
||||
float _yaw_test_ratio{}; // yaw innovation consistency check ratio
|
||||
AlphaFilter<float> _yaw_signed_test_ratio_lpf{0.1f}; // average signed test ratio used to detect a bias in the state
|
||||
Vector3f _mag_test_ratio{}; // magnetometer XYZ innovation consistency check ratios
|
||||
Vector2f _ev_vel_test_ratio{}; // EV velocity innovation consistency check ratios
|
||||
Vector2f _ev_pos_test_ratio{}; // EV position innovation consistency check ratios
|
||||
Vector2f _aux_vel_test_ratio{}; // Auxiliary horizontal velocity innovation consistency check ratio
|
||||
float _optflow_test_ratio{}; // Optical flow innovation consistency check ratio
|
||||
float _hagl_test_ratio{}; // height above terrain measurement innovation consistency check ratio
|
||||
float _beta_test_ratio{}; // sideslip innovation consistency check ratio
|
||||
|
||||
@@ -49,7 +49,10 @@ void Ekf::controlGpsFusion()
|
||||
// Check for new GPS data that has fallen behind the fusion time horizon
|
||||
if (_gps_data_ready) {
|
||||
|
||||
updateGpsYaw(_gps_sample_delayed);
|
||||
// reset flags
|
||||
resetEstimatorAidStatusFlags(_aid_src_gnss_vel);
|
||||
resetEstimatorAidStatusFlags(_aid_src_gnss_pos);
|
||||
|
||||
updateGpsVel(_gps_sample_delayed);
|
||||
updateGpsPos(_gps_sample_delayed);
|
||||
|
||||
|
||||
@@ -1,6 +1,6 @@
|
||||
/****************************************************************************
|
||||
*
|
||||
* Copyright (c) 2021-2022 PX4. All rights reserved.
|
||||
* Copyright (c) 2021 PX4. All rights reserved.
|
||||
*
|
||||
* Redistribution and use in source and binary forms, with or without
|
||||
* modification, are permitted provided that the following conditions
|
||||
@@ -39,43 +39,16 @@
|
||||
/* #include <mathlib/mathlib.h> */
|
||||
#include "ekf.h"
|
||||
|
||||
void Ekf::updateGpsYaw(const gpsSample &gps_sample)
|
||||
{
|
||||
auto &gps_yaw = _aid_src_gnss_yaw;
|
||||
resetEstimatorAidStatusFlags(gps_yaw);
|
||||
|
||||
if (PX4_ISFINITE(gps_sample.yaw)) {
|
||||
// initially populate for estimator_aid_src_gnss_yaw logging
|
||||
|
||||
// calculate the observed yaw angle of antenna array, converting a from body to antenna yaw measurement
|
||||
const float measured_hdg = wrap_pi(_gps_sample_delayed.yaw + _gps_yaw_offset);
|
||||
|
||||
gps_yaw.observation = measured_hdg;
|
||||
gps_yaw.observation_variance = sq(fmaxf(_params.gps_heading_noise, 1.0e-2f));
|
||||
|
||||
// define the predicted antenna array vector and rotate into earth frame
|
||||
const Vector3f ant_vec_bf = {cosf(_gps_yaw_offset), sinf(_gps_yaw_offset), 0.0f};
|
||||
const Vector3f ant_vec_ef = _R_to_earth * ant_vec_bf;
|
||||
const float predicted_hdg = atan2f(ant_vec_ef(1), ant_vec_ef(0));
|
||||
gps_yaw.innovation = wrap_pi(predicted_hdg - gps_yaw.observation);
|
||||
|
||||
gps_yaw.fusion_enabled = _control_status.flags.gps_yaw;
|
||||
|
||||
gps_yaw.timestamp_sample = gps_sample.time_us;
|
||||
}
|
||||
}
|
||||
|
||||
void Ekf::updateGpsVel(const gpsSample &gps_sample)
|
||||
{
|
||||
auto &gps_vel = _aid_src_gnss_vel;
|
||||
resetEstimatorAidStatus(gps_vel);
|
||||
|
||||
const float vel_var = sq(gps_sample.sacc);
|
||||
const Vector3f obs_var{vel_var, vel_var, vel_var * sq(1.5f)};
|
||||
|
||||
// innovation gate size
|
||||
const float innov_gate = fmaxf(_params.gps_vel_innov_gate, 1.f);
|
||||
|
||||
auto &gps_vel = _aid_src_gnss_vel;
|
||||
|
||||
for (int i = 0; i < 3; i++) {
|
||||
gps_vel.observation[i] = gps_sample.vel(i);
|
||||
gps_vel.observation_variance[i] = obs_var(i);
|
||||
@@ -99,9 +72,6 @@ void Ekf::updateGpsVel(const gpsSample &gps_sample)
|
||||
|
||||
void Ekf::updateGpsPos(const gpsSample &gps_sample)
|
||||
{
|
||||
auto &gps_pos = _aid_src_gnss_pos;
|
||||
resetEstimatorAidStatus(gps_pos);
|
||||
|
||||
Vector3f position;
|
||||
position(0) = gps_sample.pos(0);
|
||||
position(1) = gps_sample.pos(1);
|
||||
@@ -130,6 +100,8 @@ void Ekf::updateGpsPos(const gpsSample &gps_sample)
|
||||
// innovation gate size
|
||||
float innov_gate = fmaxf(_params.gps_pos_innov_gate, 1.f);
|
||||
|
||||
auto &gps_pos = _aid_src_gnss_pos;
|
||||
|
||||
for (int i = 0; i < 3; i++) {
|
||||
gps_pos.observation[i] = position(i);
|
||||
gps_pos.observation_variance[i] = obs_var(i);
|
||||
|
||||
@@ -60,27 +60,18 @@ void Ekf::fuseGpsYaw()
|
||||
const Vector3f ant_vec_bf = {cosf(_gps_yaw_offset), sinf(_gps_yaw_offset), 0.0f};
|
||||
const Vector3f ant_vec_ef = _R_to_earth * ant_vec_bf;
|
||||
|
||||
// calculate predicted antenna yaw angle
|
||||
const float predicted_hdg = atan2f(ant_vec_ef(1), ant_vec_ef(0));
|
||||
|
||||
// wrap the innovation to the interval between +-pi
|
||||
const float heading_innov = wrap_pi(predicted_hdg - measured_hdg);
|
||||
|
||||
// using magnetic heading process noise
|
||||
// TODO extend interface to use yaw uncertainty provided by GPS if available
|
||||
const float R_YAW = sq(fmaxf(_params.gps_heading_noise, 1.0e-2f));
|
||||
|
||||
_aid_src_gnss_yaw.timestamp_sample = _gps_sample_delayed.time_us;
|
||||
_aid_src_gnss_yaw.observation = measured_hdg;
|
||||
_aid_src_gnss_yaw.observation_variance = R_YAW;
|
||||
_aid_src_gnss_yaw.innovation = heading_innov;
|
||||
_aid_src_gnss_yaw.fusion_enabled = _control_status.flags.gps_yaw;
|
||||
|
||||
// check if antenna array vector is within 30 degrees of vertical and therefore unable to provide a reliable heading
|
||||
if (fabsf(ant_vec_ef(2)) > cosf(math::radians(30.0f))) {
|
||||
return;
|
||||
}
|
||||
|
||||
// calculate predicted antenna yaw angle
|
||||
const float predicted_hdg = atan2f(ant_vec_ef(1), ant_vec_ef(0));
|
||||
|
||||
// using magnetic heading process noise
|
||||
// TODO extend interface to use yaw uncertainty provided by GPS if available
|
||||
const float R_YAW = sq(fmaxf(_params.gps_heading_noise, 1.0e-2f));
|
||||
|
||||
// calculate intermediate variables
|
||||
const float HK0 = sinf(_gps_yaw_offset);
|
||||
const float HK1 = q0*q3;
|
||||
@@ -130,11 +121,9 @@ void Ekf::fuseGpsYaw()
|
||||
// const float HK32 = HK18/(-HK16*HK27*HK29 - HK24*HK28*HK29 - HK25*HK29*HK30 + HK26*HK29*HK31 + R_YAW);
|
||||
|
||||
// check if the innovation variance calculation is badly conditioned
|
||||
const float heading_innov_var = (-HK16*HK27*HK29 - HK24*HK28*HK29 - HK25*HK29*HK30 + HK26*HK29*HK31 + R_YAW);
|
||||
_heading_innov_var = (-HK16*HK27*HK29 - HK24*HK28*HK29 - HK25*HK29*HK30 + HK26*HK29*HK31 + R_YAW);
|
||||
|
||||
_aid_src_gnss_yaw.innovation_variance = heading_innov_var;
|
||||
|
||||
if (heading_innov_var < R_YAW) {
|
||||
if (_heading_innov_var < R_YAW) {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_hdg = true;
|
||||
|
||||
@@ -145,15 +134,19 @@ void Ekf::fuseGpsYaw()
|
||||
}
|
||||
|
||||
_fault_status.flags.bad_hdg = false;
|
||||
const float HK32 = HK18 / heading_innov_var;
|
||||
const float HK32 = HK18 / _heading_innov_var;
|
||||
|
||||
// calculate the innovation and define the innovation gate
|
||||
const float innov_gate = math::max(_params.heading_innov_gate, 1.0f);
|
||||
_heading_innov = predicted_hdg - measured_hdg;
|
||||
|
||||
// wrap the innovation to the interval between +-pi
|
||||
_heading_innov = wrap_pi(_heading_innov);
|
||||
|
||||
// innovation test ratio
|
||||
setEstimatorAidStatusTestRatio(_aid_src_gnss_yaw, innov_gate);
|
||||
_yaw_test_ratio = sq(_heading_innov) / (sq(innov_gate) * _heading_innov_var);
|
||||
|
||||
if (_aid_src_gnss_yaw.innovation_rejected) {
|
||||
if (_yaw_test_ratio > 1.0f) {
|
||||
_innov_check_fail_status.flags.reject_yaw = true;
|
||||
return;
|
||||
|
||||
@@ -161,10 +154,10 @@ void Ekf::fuseGpsYaw()
|
||||
_innov_check_fail_status.flags.reject_yaw = false;
|
||||
}
|
||||
|
||||
_gnss_yaw_signed_test_ratio_lpf.update(matrix::sign(heading_innov) * _aid_src_gnss_yaw.test_ratio);
|
||||
_yaw_signed_test_ratio_lpf.update(matrix::sign(_heading_innov) * _yaw_test_ratio);
|
||||
|
||||
if ((fabsf(_gnss_yaw_signed_test_ratio_lpf.getState()) > 0.2f)
|
||||
&& !_control_status.flags.in_air && isTimedOut(_aid_src_gnss_yaw.time_last_fuse, (uint64_t)1e6)) {
|
||||
if ((fabsf(_yaw_signed_test_ratio_lpf.getState()) > 0.2f)
|
||||
&& !_control_status.flags.in_air && isTimedOut(_time_last_heading_fuse, (uint64_t)1e6)) {
|
||||
|
||||
// A constant large signed test ratio is a sign of wrong gyro bias
|
||||
// Reset the yaw gyro variance to converge faster and avoid
|
||||
@@ -191,13 +184,12 @@ void Ekf::fuseGpsYaw()
|
||||
Kfusion(row) = HK32*(-HK16*P(0,row) - HK24*P(1,row) - HK25*P(2,row) + HK26*P(3,row));
|
||||
}
|
||||
|
||||
const bool is_fused = measurementUpdate(Kfusion, Hfusion, heading_innov);
|
||||
const bool is_fused = measurementUpdate(Kfusion, Hfusion, _heading_innov);
|
||||
_fault_status.flags.bad_hdg = !is_fused;
|
||||
_aid_src_gnss_yaw.fused = is_fused;
|
||||
|
||||
if (is_fused) {
|
||||
_time_last_gps_yaw_fuse = _time_last_imu;
|
||||
_time_last_heading_fuse = _time_last_imu;
|
||||
_aid_src_gnss_yaw.time_last_fuse = _time_last_imu;
|
||||
}
|
||||
}
|
||||
|
||||
@@ -215,11 +207,11 @@ bool Ekf::resetYawToGps()
|
||||
// GPS yaw measurement is alreday compensated for antenna offset in the driver
|
||||
const float measured_yaw = _gps_sample_delayed.yaw;
|
||||
|
||||
const float yaw_variance = sq(fmaxf(_params.gps_heading_noise, 1.e-2f));
|
||||
const float yaw_variance = sq(fmaxf(_params.gps_heading_noise, 1.0e-2f));
|
||||
resetQuatStateYaw(measured_yaw, yaw_variance, true);
|
||||
|
||||
_aid_src_gnss_yaw.time_last_fuse = _time_last_imu;
|
||||
_gnss_yaw_signed_test_ratio_lpf.reset(0.f);
|
||||
_time_last_gps_yaw_fuse = _time_last_imu;
|
||||
_yaw_signed_test_ratio_lpf.reset(0.f);
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
@@ -66,28 +66,6 @@ void Ekf::controlMagFusion()
|
||||
}
|
||||
|
||||
_control_status.flags.mag_field_disturbed = magFieldStrengthDisturbed(mag_sample.mag);
|
||||
|
||||
|
||||
// compute mag heading innovation (for estimator_aid_src_mag_heading logging)
|
||||
const Vector3f mag_observation = mag_sample.mag - _state.mag_B;
|
||||
const Dcmf R_to_earth = shouldUse321RotationSequence(_R_to_earth) ? updateEuler321YawInRotMat(0.f, _R_to_earth) : updateEuler312YawInRotMat(0.f, _R_to_earth);
|
||||
const Vector3f mag_earth_pred = R_to_earth * mag_observation;
|
||||
|
||||
resetEstimatorAidStatus(_aid_src_mag_heading);
|
||||
_aid_src_mag_heading.timestamp_sample = mag_sample.time_us;
|
||||
_aid_src_mag_heading.observation = -atan2f(mag_earth_pred(1), mag_earth_pred(0)) + getMagDeclination();;
|
||||
_aid_src_mag_heading.innovation = wrap_pi(getEulerYaw(_R_to_earth) - _aid_src_mag_heading.observation);
|
||||
|
||||
// compute magnetometer innovations (for estimator_aid_src_mag logging)
|
||||
// rotate magnetometer earth field state into body frame
|
||||
const Dcmf R_to_body = quatToInverseRotMat(_state.quat_nominal);
|
||||
const Vector3f mag_I_rot = R_to_body * _state.mag_I;
|
||||
const Vector3f mag_innov = mag_I_rot - mag_observation;
|
||||
|
||||
resetEstimatorAidStatus(_aid_src_mag);
|
||||
_aid_src_mag.timestamp_sample = mag_sample.time_us;
|
||||
mag_observation.copyTo(_aid_src_mag.observation);
|
||||
mag_innov.copyTo(_aid_src_mag.innovation);
|
||||
}
|
||||
}
|
||||
|
||||
@@ -366,9 +344,9 @@ void Ekf::runMagAndMagDeclFusions(const Vector3f &mag)
|
||||
float innovation = wrap_pi(getEulerYaw(_R_to_earth) - measured_hdg);
|
||||
float obs_var = fmaxf(sq(_params.mag_heading_noise), 1.e-4f);
|
||||
|
||||
_aid_src_mag_heading.fusion_enabled = _control_status.flags.mag_hdg;
|
||||
|
||||
fuseYaw(innovation, obs_var, _aid_src_mag_heading);
|
||||
if (fuseYaw(innovation, obs_var)) {
|
||||
_time_last_mag_heading_fuse = _time_last_imu;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
@@ -386,13 +364,13 @@ void Ekf::run3DMagAndDeclFusions(const Vector3f &mag)
|
||||
// states for the first few observations.
|
||||
fuseDeclination(0.02f);
|
||||
_mag_decl_cov_reset = true;
|
||||
fuseMag(mag, _aid_src_mag, update_all_states);
|
||||
fuseMag(mag, update_all_states);
|
||||
|
||||
} else {
|
||||
// The normal sequence is to fuse the magnetometer data first before fusing
|
||||
// declination angle at a higher uncertainty to allow some learning of
|
||||
// declination angle over time.
|
||||
fuseMag(mag, _aid_src_mag, update_all_states);
|
||||
fuseMag(mag, update_all_states);
|
||||
|
||||
if (_control_status.flags.mag_dec) {
|
||||
fuseDeclination(0.5f);
|
||||
|
||||
@@ -45,7 +45,7 @@
|
||||
|
||||
#include <mathlib/mathlib.h>
|
||||
|
||||
bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, bool update_all_states)
|
||||
bool Ekf::fuseMag(const Vector3f &mag, bool update_all_states)
|
||||
{
|
||||
// assign intermediate variables
|
||||
const float q0 = _state.quat_nominal(0);
|
||||
@@ -87,9 +87,9 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
const float HKX22 = HKX10*P(1,17) - HKX11*P(1,18) + HKX12*P(1,1) + HKX13*P(0,1) - HKX14*P(1,2) + HKX15*P(1,3) + HKX6*P(1,16) + P(1,19);
|
||||
const float HKX23 = HKX10*P(17,19) - HKX11*P(18,19) + HKX12*P(1,19) + HKX13*P(0,19) - HKX14*P(2,19) + HKX15*P(3,19) + HKX6*P(16,19) + P(19,19);
|
||||
|
||||
aid_src_mag.innovation_variance[0] = HKX10*HKX20 - HKX11*HKX18 + HKX12*HKX22 + HKX13*HKX16 - HKX14*HKX19 + HKX15*HKX21 + HKX17*HKX6 + HKX23 + R_MAG;
|
||||
_mag_innov_var(0) = HKX10*HKX20 - HKX11*HKX18 + HKX12*HKX22 + HKX13*HKX16 - HKX14*HKX19 + HKX15*HKX21 + HKX17*HKX6 + HKX23 + R_MAG;
|
||||
|
||||
if (aid_src_mag.innovation_variance[0] < R_MAG) {
|
||||
if (_mag_innov_var(0) < R_MAG) {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_mag_x = true;
|
||||
|
||||
@@ -101,7 +101,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
|
||||
_fault_status.flags.bad_mag_x = false;
|
||||
|
||||
const float HKX24 = 1.0F/aid_src_mag.innovation_variance[0];
|
||||
const float HKX24 = 1.0F/_mag_innov_var(0);
|
||||
|
||||
// intermediate variables for calculation of innovations variances for Y and Z axes
|
||||
// don't calculate all terms needed for observation jacobians and Kalman gains because
|
||||
@@ -126,11 +126,12 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
const float IV17 = 2*IV0 - 2*IV1;
|
||||
const float IV18 = IV10 - IV8 + IV9;
|
||||
|
||||
aid_src_mag.innovation_variance[1] = IV11*P(17,20) + IV11*(IV11*P(17,17) + IV2*P(17,18) - IV3*P(16,17) + IV4*P(2,17) + IV5*P(0,17) + IV6*P(1,17) - IV7*P(3,17) + P(17,20)) + IV2*P(18,20) + IV2*(IV11*P(17,18) + IV2*P(18,18) - IV3*P(16,18) + IV4*P(2,18) + IV5*P(0,18) + IV6*P(1,18) - IV7*P(3,18) + P(18,20)) - IV3*P(16,20) - IV3*(IV11*P(16,17) + IV2*P(16,18) - IV3*P(16,16) + IV4*P(2,16) + IV5*P(0,16) + IV6*P(1,16) - IV7*P(3,16) + P(16,20)) + IV4*P(2,20) + IV4*(IV11*P(2,17) - IV12 + IV2*P(2,18) - IV3*P(2,16) + IV4*P(2,2) + IV5*P(0,2) + IV6*P(1,2) + P(2,20)) + IV5*P(0,20) + IV5*(IV11*P(0,17) + IV14 + IV2*P(0,18) - IV3*P(0,16) + IV4*P(0,2) + IV5*P(0,0) - IV7*P(0,3) + P(0,20)) + IV6*P(1,20) + IV6*(IV11*P(1,17) + IV13 + IV2*P(1,18) - IV3*P(1,16) + IV4*P(1,2) + IV6*P(1,1) - IV7*P(1,3) + P(1,20)) - IV7*P(3,20) - IV7*(IV11*P(3,17) + IV15 + IV2*P(3,18) - IV3*P(3,16) + IV5*P(0,3) + IV6*P(1,3) - IV7*P(3,3) + P(3,20)) + P(20,20) + R_MAG;
|
||||
aid_src_mag.innovation_variance[2] = IV16*P(16,21) + IV16*(IV16*P(16,16) - IV17*P(16,17) + IV18*P(16,18) + IV4*P(3,16) - IV5*P(1,16) + IV6*P(0,16) + IV7*P(2,16) + P(16,21)) - IV17*P(17,21) - IV17*(IV16*P(16,17) - IV17*P(17,17) + IV18*P(17,18) + IV4*P(3,17) - IV5*P(1,17) + IV6*P(0,17) + IV7*P(2,17) + P(17,21)) + IV18*P(18,21) + IV18*(IV16*P(16,18) - IV17*P(17,18) + IV18*P(18,18) + IV4*P(3,18) - IV5*P(1,18) + IV6*P(0,18) + IV7*P(2,18) + P(18,21)) + IV4*P(3,21) + IV4*(IV12 + IV16*P(3,16) - IV17*P(3,17) + IV18*P(3,18) + IV4*P(3,3) - IV5*P(1,3) + IV6*P(0,3) + P(3,21)) - IV5*P(1,21) - IV5*(IV14 + IV16*P(1,16) - IV17*P(1,17) + IV18*P(1,18) + IV4*P(1,3) - IV5*P(1,1) + IV7*P(1,2) + P(1,21)) + IV6*P(0,21) + IV6*(-IV13 + IV16*P(0,16) - IV17*P(0,17) + IV18*P(0,18) + IV4*P(0,3) + IV6*P(0,0) + IV7*P(0,2) + P(0,21)) + IV7*P(2,21) + IV7*(IV15 + IV16*P(2,16) - IV17*P(2,17) + IV18*P(2,18) - IV5*P(1,2) + IV6*P(0,2) + IV7*P(2,2) + P(2,21)) + P(21,21) + R_MAG;
|
||||
_mag_innov_var(1) = IV11*P(17,20) + IV11*(IV11*P(17,17) + IV2*P(17,18) - IV3*P(16,17) + IV4*P(2,17) + IV5*P(0,17) + IV6*P(1,17) - IV7*P(3,17) + P(17,20)) + IV2*P(18,20) + IV2*(IV11*P(17,18) + IV2*P(18,18) - IV3*P(16,18) + IV4*P(2,18) + IV5*P(0,18) + IV6*P(1,18) - IV7*P(3,18) + P(18,20)) - IV3*P(16,20) - IV3*(IV11*P(16,17) + IV2*P(16,18) - IV3*P(16,16) + IV4*P(2,16) + IV5*P(0,16) + IV6*P(1,16) - IV7*P(3,16) + P(16,20)) + IV4*P(2,20) + IV4*(IV11*P(2,17) - IV12 + IV2*P(2,18) - IV3*P(2,16) + IV4*P(2,2) + IV5*P(0,2) + IV6*P(1,2) + P(2,20)) + IV5*P(0,20) + IV5*(IV11*P(0,17) + IV14 + IV2*P(0,18) - IV3*P(0,16) + IV4*P(0,2) + IV5*P(0,0) - IV7*P(0,3) + P(0,20)) + IV6*P(1,20) + IV6*(IV11*P(1,17) + IV13 + IV2*P(1,18) - IV3*P(1,16) + IV4*P(1,2) + IV6*P(1,1) - IV7*P(1,3) + P(1,20)) - IV7*P(3,20) - IV7*(IV11*P(3,17) + IV15 + IV2*P(3,18) - IV3*P(3,16) + IV5*P(0,3) + IV6*P(1,3) - IV7*P(3,3) + P(3,20)) + P(20,20) + R_MAG;
|
||||
_mag_innov_var(2) = IV16*P(16,21) + IV16*(IV16*P(16,16) - IV17*P(16,17) + IV18*P(16,18) + IV4*P(3,16) - IV5*P(1,16) + IV6*P(0,16) + IV7*P(2,16) + P(16,21)) - IV17*P(17,21) - IV17*(IV16*P(16,17) - IV17*P(17,17) + IV18*P(17,18) + IV4*P(3,17) - IV5*P(1,17) + IV6*P(0,17) + IV7*P(2,17) + P(17,21)) + IV18*P(18,21) + IV18*(IV16*P(16,18) - IV17*P(17,18) + IV18*P(18,18) + IV4*P(3,18) - IV5*P(1,18) + IV6*P(0,18) + IV7*P(2,18) + P(18,21)) + IV4*P(3,21) + IV4*(IV12 + IV16*P(3,16) - IV17*P(3,17) + IV18*P(3,18) + IV4*P(3,3) - IV5*P(1,3) + IV6*P(0,3) + P(3,21)) - IV5*P(1,21) - IV5*(IV14 + IV16*P(1,16) - IV17*P(1,17) + IV18*P(1,18) + IV4*P(1,3) - IV5*P(1,1) + IV7*P(1,2) + P(1,21)) + IV6*P(0,21) + IV6*(-IV13 + IV16*P(0,16) - IV17*P(0,17) + IV18*P(0,18) + IV4*P(0,3) + IV6*P(0,0) + IV7*P(0,2) + P(0,21)) + IV7*P(2,21) + IV7*(IV15 + IV16*P(2,16) - IV17*P(2,17) + IV18*P(2,18) - IV5*P(1,2) + IV6*P(0,2) + IV7*P(2,2) + P(2,21)) + P(21,21) + R_MAG;
|
||||
|
||||
// check innovation variances for being badly conditioned
|
||||
if (aid_src_mag.innovation_variance[1] < R_MAG) {
|
||||
// chedk innovation variances for being badly conditioned
|
||||
|
||||
if (_mag_innov_var(1) < R_MAG) {
|
||||
// the innovation variance contribution from the state covariances is negtive which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_mag_y = true;
|
||||
|
||||
@@ -142,7 +143,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
|
||||
_fault_status.flags.bad_mag_y = false;
|
||||
|
||||
if (aid_src_mag.innovation_variance[2] < R_MAG) {
|
||||
if (_mag_innov_var(2) < R_MAG) {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_mag_z = true;
|
||||
|
||||
@@ -156,40 +157,46 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
|
||||
// rotate magnetometer earth field state into body frame
|
||||
const Dcmf R_to_body = quatToInverseRotMat(_state.quat_nominal);
|
||||
|
||||
const Vector3f mag_I_rot = R_to_body * _state.mag_I;
|
||||
|
||||
// compute magnetometer innovations
|
||||
const Vector3f mag_observation = mag - _state.mag_B;
|
||||
Vector3f mag_innov = mag_I_rot - mag_observation;
|
||||
_mag_innov = mag_I_rot + _state.mag_B - mag;
|
||||
|
||||
// do not use the synthesized measurement for the magnetomter Z component for 3D fusion
|
||||
if (_control_status.flags.synthetic_mag_z) {
|
||||
mag_innov(2) = 0.0f;
|
||||
_mag_innov(2) = 0.0f;
|
||||
}
|
||||
|
||||
for (int i = 0; i < 3; i++) {
|
||||
aid_src_mag.observation[i] = mag_observation(i);
|
||||
aid_src_mag.observation_variance[i] = R_MAG;
|
||||
aid_src_mag.innovation[i] = mag_innov(i);
|
||||
aid_src_mag.fusion_enabled[i] = _control_status.flags.mag_3D && update_all_states;
|
||||
}
|
||||
|
||||
// do not use the synthesized measurement for the magnetomter Z component for 3D fusion
|
||||
if (_control_status.flags.synthetic_mag_z) {
|
||||
aid_src_mag.innovation[2] = 0.0f;
|
||||
aid_src_mag.innovation_rejected[2] = false;
|
||||
}
|
||||
|
||||
const float innov_gate = math::max(_params.mag_innov_gate, 1.f);
|
||||
setEstimatorAidStatusTestRatio(aid_src_mag, innov_gate);
|
||||
|
||||
// Perform an innovation consistency check and report the result
|
||||
_innov_check_fail_status.flags.reject_mag_x = aid_src_mag.innovation_rejected[0];
|
||||
_innov_check_fail_status.flags.reject_mag_y = aid_src_mag.innovation_rejected[1];
|
||||
_innov_check_fail_status.flags.reject_mag_z = aid_src_mag.innovation_rejected[2];
|
||||
bool all_innovation_checks_passed = true;
|
||||
|
||||
for (uint8_t index = 0; index <= 2; index++) {
|
||||
_mag_test_ratio(index) = sq(_mag_innov(index)) / (sq(math::max(_params.mag_innov_gate, 1.0f)) * _mag_innov_var(index));
|
||||
|
||||
bool rejected = (_mag_test_ratio(index) > 1.f);
|
||||
|
||||
switch (index) {
|
||||
case 0:
|
||||
_innov_check_fail_status.flags.reject_mag_x = rejected;
|
||||
break;
|
||||
|
||||
case 1:
|
||||
_innov_check_fail_status.flags.reject_mag_y = rejected;
|
||||
break;
|
||||
|
||||
case 2:
|
||||
_innov_check_fail_status.flags.reject_mag_z = rejected;
|
||||
break;
|
||||
}
|
||||
|
||||
if (rejected) {
|
||||
all_innovation_checks_passed = false;
|
||||
}
|
||||
}
|
||||
|
||||
// if any axis fails, abort the mag fusion
|
||||
if (aid_src_mag.innovation_rejected[0] || aid_src_mag.innovation_rejected[1] || aid_src_mag.innovation_rejected[2]) {
|
||||
if (!all_innovation_checks_passed) {
|
||||
return false;
|
||||
}
|
||||
|
||||
@@ -239,7 +246,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
|
||||
} else if (index == 1) {
|
||||
|
||||
// recalculate innovation variance because states and covariances have changed due to previous fusion
|
||||
// recalculate innovation variance becasue states and covariances have changed due to previous fusion
|
||||
const float HKY0 = magD*q1 + magE*q0 - magN*q3;
|
||||
const float HKY1 = magD*q0 - magE*q1 + magN*q2;
|
||||
const float HKY2 = magD*q3 + magE*q2 + magN*q1;
|
||||
@@ -265,9 +272,9 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
const float HKY22 = HKY10*P(2,18) - HKY11*P(2,16) + HKY12*P(2,2) + HKY13*P(0,2) + HKY14*P(1,2) - HKY15*P(2,3) + HKY8*P(2,17) + P(2,20);
|
||||
const float HKY23 = HKY10*P(18,20) - HKY11*P(16,20) + HKY12*P(2,20) + HKY13*P(0,20) + HKY14*P(1,20) - HKY15*P(3,20) + HKY8*P(17,20) + P(20,20);
|
||||
|
||||
aid_src_mag.innovation_variance[1] = (HKY10*HKY20 - HKY11*HKY18 + HKY12*HKY22 + HKY13*HKY16 + HKY14*HKY21 - HKY15*HKY19 + HKY17*HKY8 + HKY23 + R_MAG);
|
||||
_mag_innov_var(1) = (HKY10*HKY20 - HKY11*HKY18 + HKY12*HKY22 + HKY13*HKY16 + HKY14*HKY21 - HKY15*HKY19 + HKY17*HKY8 + HKY23 + R_MAG);
|
||||
|
||||
if (aid_src_mag.innovation_variance[1] < R_MAG) {
|
||||
if (_mag_innov_var(1) < R_MAG) {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_mag_y = true;
|
||||
|
||||
@@ -276,7 +283,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
ECL_ERR("magY %s", numerical_error_covariance_reset_string);
|
||||
return false;
|
||||
}
|
||||
const float HKY24 = 1.0F/aid_src_mag.innovation_variance[1];
|
||||
const float HKY24 = 1.0F/_mag_innov_var(1);
|
||||
|
||||
// Calculate Y axis observation jacobians
|
||||
Hfusion.setZero();
|
||||
@@ -345,9 +352,9 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
const float HKZ22 = HKZ10*P(2,16) - HKZ11*P(2,17) + HKZ12*P(2,3) + HKZ13*P(0,2) - HKZ14*P(1,2) + HKZ15*P(2,2) + HKZ9*P(2,18) + P(2,21);
|
||||
const float HKZ23 = HKZ10*P(16,21) - HKZ11*P(17,21) + HKZ12*P(3,21) + HKZ13*P(0,21) - HKZ14*P(1,21) + HKZ15*P(2,21) + HKZ9*P(18,21) + P(21,21);
|
||||
|
||||
aid_src_mag.innovation_variance[2] = (HKZ10*HKZ20 - HKZ11*HKZ18 + HKZ12*HKZ21 + HKZ13*HKZ16 - HKZ14*HKZ19 + HKZ15*HKZ22 + HKZ17*HKZ9 + HKZ23 + R_MAG);
|
||||
_mag_innov_var(2) = (HKZ10*HKZ20 - HKZ11*HKZ18 + HKZ12*HKZ21 + HKZ13*HKZ16 - HKZ14*HKZ19 + HKZ15*HKZ22 + HKZ17*HKZ9 + HKZ23 + R_MAG);
|
||||
|
||||
if (aid_src_mag.innovation_variance[2] < R_MAG) {
|
||||
if (_mag_innov_var(2) < R_MAG) {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
_fault_status.flags.bad_mag_z = true;
|
||||
|
||||
@@ -357,7 +364,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
return false;
|
||||
}
|
||||
|
||||
const float HKZ24 = 1.0F/aid_src_mag.innovation_variance[2];
|
||||
const float HKZ24 = 1.0F/_mag_innov_var(2);
|
||||
|
||||
// calculate Z axis observation jacobians
|
||||
Hfusion.setZero();
|
||||
@@ -397,16 +404,7 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
Kfusion(21) = HKZ23*HKZ24;
|
||||
}
|
||||
|
||||
const bool is_fused = measurementUpdate(Kfusion, Hfusion, aid_src_mag.innovation[index]);
|
||||
|
||||
if (is_fused) {
|
||||
aid_src_mag.fused[index] = true;
|
||||
aid_src_mag.time_last_fuse[index] = _time_last_imu;
|
||||
|
||||
} else {
|
||||
aid_src_mag.fused[index] = false;
|
||||
}
|
||||
|
||||
const bool is_fused = measurementUpdate(Kfusion, Hfusion, _mag_innov(index));
|
||||
|
||||
switch (index) {
|
||||
case 0:
|
||||
@@ -427,14 +425,17 @@ bool Ekf::fuseMag(const Vector3f &mag, estimator_aid_source_3d_s &aid_src_mag, b
|
||||
}
|
||||
}
|
||||
|
||||
return aid_src_mag.fused[0] && aid_src_mag.fused[1] && aid_src_mag.fused[2];
|
||||
if (!_fault_status.flags.bad_mag_x && !_fault_status.flags.bad_mag_y && !_fault_status.flags.bad_mag_z) {
|
||||
_time_last_mag_3d_fuse = _time_last_imu;
|
||||
return true;
|
||||
}
|
||||
|
||||
return false;
|
||||
}
|
||||
|
||||
// update quaternion states and covariances using the yaw innovation and yaw observation variance
|
||||
bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_source_1d_s& aid_src_status)
|
||||
bool Ekf::fuseYaw(const float innovation, const float variance)
|
||||
{
|
||||
aid_src_status.innovation = innovation;
|
||||
|
||||
// assign intermediate state variables
|
||||
const float q0 = _state.quat_nominal(0);
|
||||
const float q1 = _state.quat_nominal(1);
|
||||
@@ -550,7 +551,7 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
|
||||
// Calculate innovation variance and Kalman gains, taking advantage of the fact that only the first 4 elements in H are non zero
|
||||
// calculate the innovation variance
|
||||
aid_src_status.innovation_variance = variance;
|
||||
_heading_innov_var = variance;
|
||||
|
||||
for (unsigned row = 0; row <= 3; row++) {
|
||||
float tmp = 0.0f;
|
||||
@@ -559,16 +560,16 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
tmp += P(row, col) * H_YAW(col);
|
||||
}
|
||||
|
||||
aid_src_status.innovation_variance += H_YAW(row) * tmp;
|
||||
_heading_innov_var += H_YAW(row) * tmp;
|
||||
}
|
||||
|
||||
float heading_innov_var_inv = 0.f;
|
||||
float heading_innov_var_inv;
|
||||
|
||||
// check if the innovation variance calculation is badly conditioned
|
||||
if (aid_src_status.innovation_variance >= variance) {
|
||||
if (_heading_innov_var >= variance) {
|
||||
// the innovation variance contribution from the state covariances is not negative, no fault
|
||||
_fault_status.flags.bad_hdg = false;
|
||||
heading_innov_var_inv = 1.f / aid_src_status.innovation_variance;
|
||||
heading_innov_var_inv = 1.0f / _heading_innov_var;
|
||||
|
||||
} else {
|
||||
// the innovation variance contribution from the state covariances is negative which means the covariance matrix is badly conditioned
|
||||
@@ -606,10 +607,10 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
float gate_sigma = math::max(_params.heading_innov_gate, 1.f);
|
||||
|
||||
// innovation test ratio
|
||||
setEstimatorAidStatusTestRatio(aid_src_status, gate_sigma);
|
||||
_yaw_test_ratio = sq(innovation) / (sq(gate_sigma) * _heading_innov_var);
|
||||
|
||||
// set the magnetometer unhealthy if the test fails
|
||||
if (aid_src_status.innovation_rejected) {
|
||||
if (_yaw_test_ratio > 1.0f) {
|
||||
_innov_check_fail_status.flags.reject_yaw = true;
|
||||
|
||||
// if we are in air we don't want to fuse the measurement
|
||||
@@ -617,13 +618,13 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
// by interference or a large initial gyro bias
|
||||
if (!_control_status.flags.in_air
|
||||
&& isTimedOut(_time_last_in_air, (uint64_t)5e6)
|
||||
&& isTimedOut(aid_src_status.time_last_fuse, (uint64_t)1e6)
|
||||
&& isTimedOut(_time_last_heading_fuse, (uint64_t)1e6)
|
||||
) {
|
||||
// constrain the innovation to the maximum set by the gate
|
||||
// we need to delay this forced fusion to avoid starting it
|
||||
// immediately after touchdown, when the drone is still armed
|
||||
float gate_limit = sqrtf((sq(gate_sigma) * aid_src_status.innovation_variance));
|
||||
aid_src_status.innovation = math::constrain(aid_src_status.innovation, -gate_limit, gate_limit);
|
||||
float gate_limit = sqrtf((sq(gate_sigma) * _heading_innov_var));
|
||||
_heading_innov = math::constrain(innovation, -gate_limit, gate_limit);
|
||||
|
||||
// also reset the yaw gyro variance to converge faster and avoid
|
||||
// being stuck on a previous bad estimate
|
||||
@@ -635,6 +636,7 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
|
||||
} else {
|
||||
_innov_check_fail_status.flags.reject_yaw = false;
|
||||
_heading_innov = innovation;
|
||||
}
|
||||
|
||||
// apply covariance correction via P_new = (I -K*H)*P
|
||||
@@ -670,11 +672,9 @@ bool Ekf::fuseYaw(const float innovation, const float variance, estimator_aid_so
|
||||
fixCovarianceErrors(true);
|
||||
|
||||
// apply the state corrections
|
||||
fuse(Kfusion, aid_src_status.innovation);
|
||||
fuse(Kfusion, _heading_innov);
|
||||
|
||||
_time_last_heading_fuse = _time_last_imu;
|
||||
aid_src_status.time_last_fuse = _time_last_imu;
|
||||
aid_src_status.fused = true;
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
@@ -1,30 +1,25 @@
|
||||
# PX4 Drag fusion parameter tuning algorithm
|
||||
|
||||
In PX4, drag fusion can be enabled in order to estimate the wind when flying a multirotor, assuming that the body vertical acceleration is produced by the rotors and that the lateral forces are produced by drag.
|
||||
The model assumes a combination of:
|
||||
1. **momentum drag:** created by the rotors changing the direction of the incoming air, linear to the relative airspeed.
|
||||
Parameter [`EKF2_MCOEF`](https://docs.px4.io/master/en/advanced_config/parameter_reference.html#EKF2_MCOEF)
|
||||
2. **bluff body drag:** created by the [wetted area](https://en.wikipedia.org/wiki/Wetted_area) of the aircraft, quadratic to the relative airspeed.
|
||||
Parameters [`EKF2_BCOEF_X`](https://docs.px4.io/master/en/advanced_config/parameter_reference.html#EKF2_BCOEF_X) and [`EKF2_BCOEF_Y`](https://docs.px4.io/master/en/advanced_config/parameter_reference.html#EKF2_BCOEF_Y)
|
||||
1. momentum drag: created by the rotors changing the direction of the incoming air, linear to the relative airspeed. Parameter `EKF2_MCOEF`
|
||||
2. bluff body drag: created by the wetted area of the aircraft, quadratic to the relative airspeed. Parameters `EKF2_BCOEF_X` and `EKF2_BCOEF_Y`
|
||||
|
||||
The python script was created to automate the tuning of the aforementioned parameters using flight test data.
|
||||
|
||||
## How to use this script
|
||||
|
||||
First, a flight log with enough information is required in order to accurately estimate the parameters.
|
||||
The best way to do this is to fly the drone in altitude mode, accelerate to a moderate-high speed and let the drone slow-down by its own drag.
|
||||
Repeat the same maneuver in all directions and several times to obtain a good dataset.
|
||||
|
||||
> **NOTE:** the current state of this script assumes no wind. Some modifications are required to estimate both the wind and the parameters at the same time.
|
||||
/!\ NOTE: the current state of this script assumes no wind. Some modifications are required to estimate both the wind and the parameters at the same time.
|
||||
|
||||
Then, install the required python packages:
|
||||
```
|
||||
pip install -r requirements.txt
|
||||
```
|
||||
|
||||
and run the script and give it the log file as an argument:
|
||||
```
|
||||
python mc_wind_estimator_tuning.py <logfilename.ulg>
|
||||
python drag_replay.py <logfilename.ulg>
|
||||
```
|
||||
|
||||
The estimated parameters are displayed in the console and the fit quality is shown in a plot:
|
||||
@@ -32,8 +27,6 @@ The estimated parameters are displayed in the console and the fit quality is sho
|
||||
param set EKF2_BCOEF_X 0.0
|
||||
param set EKF2_BCOEF_Y 62.1
|
||||
param set EKF2_MCOEF 0.16
|
||||
|
||||
# EXPERIMENTAL
|
||||
param set EKF2_DRAG_NOISE 0.31
|
||||
/!\EXPERIMENTAL param set EKF2_DRAG_NOISE 0.31
|
||||
```
|
||||
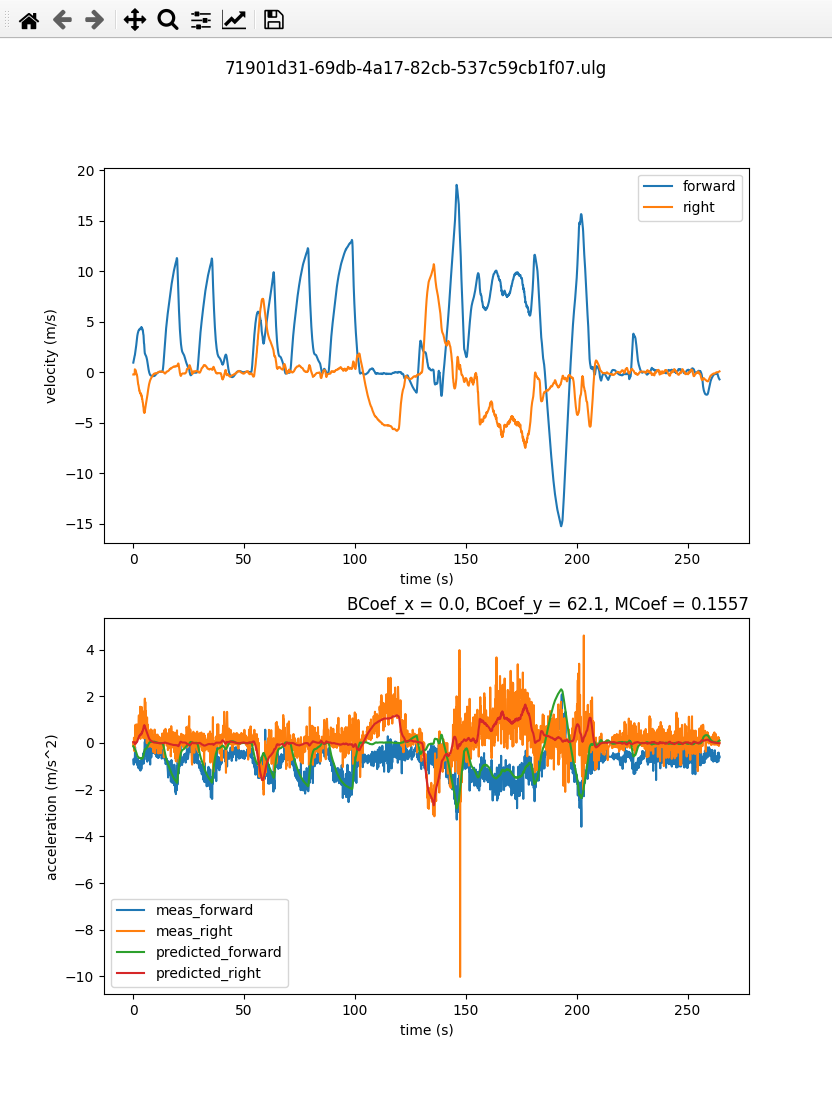
|
||||
|
||||
@@ -159,102 +159,6 @@ bool Ekf::fuseVerticalPosition(const float innov, const float innov_gate, const
|
||||
}
|
||||
}
|
||||
|
||||
void Ekf::updateVelocityAidSrcStatus(const uint64_t& sample_time_us, const Vector3f& velocity, const Vector3f& obs_var, const float innov_gate, estimator_aid_source_3d_s& vel_aid_src) const
|
||||
{
|
||||
resetEstimatorAidStatus(vel_aid_src);
|
||||
|
||||
for (int i = 0; i < 3; i++) {
|
||||
vel_aid_src.observation[i] = velocity(i);
|
||||
vel_aid_src.observation_variance[i] = obs_var(i);
|
||||
|
||||
vel_aid_src.innovation[i] = _state.vel(i) - velocity(i);
|
||||
vel_aid_src.innovation_variance[i] = P(4 + i, 4 + i) + obs_var(i);
|
||||
}
|
||||
|
||||
setEstimatorAidStatusTestRatio(vel_aid_src, innov_gate);
|
||||
|
||||
// vz special case if there is bad vertical acceleration data, then don't reject measurement,
|
||||
// but limit innovation to prevent spikes that could destabilise the filter
|
||||
if (_fault_status.flags.bad_acc_vertical && vel_aid_src.innovation_rejected[2]) {
|
||||
const float innov_limit = innov_gate * sqrtf(vel_aid_src.innovation_variance[2]);
|
||||
vel_aid_src.innovation[2] = math::constrain(vel_aid_src.innovation[2], -innov_limit, innov_limit);
|
||||
vel_aid_src.innovation_rejected[2] = false;
|
||||
}
|
||||
|
||||
vel_aid_src.timestamp_sample = sample_time_us;
|
||||
}
|
||||
|
||||
void Ekf::updatePositionAidSrcStatus(const uint64_t& sample_time_us, const Vector3f& position, const Vector3f& obs_var, const float innov_gate, estimator_aid_source_3d_s& pos_aid_src) const
|
||||
{
|
||||
resetEstimatorAidStatus(pos_aid_src);
|
||||
|
||||
for (int i = 0; i < 3; i++) {
|
||||
pos_aid_src.observation[i] = position(i);
|
||||
pos_aid_src.observation_variance[i] = obs_var(i);
|
||||
|
||||
pos_aid_src.innovation[i] = _state.pos(i) - position(i);
|
||||
pos_aid_src.innovation_variance[i] = P(7 + i, 7 + i) + obs_var(i);
|
||||
}
|
||||
|
||||
setEstimatorAidStatusTestRatio(pos_aid_src, innov_gate);
|
||||
|
||||
// z special case if there is bad vertical acceleration data, then don't reject measurement,
|
||||
// but limit innovation to prevent spikes that could destabilise the filter
|
||||
if (_fault_status.flags.bad_acc_vertical && pos_aid_src.innovation_rejected[2]) {
|
||||
const float innov_limit = innov_gate * sqrtf(pos_aid_src.innovation_variance[2]);
|
||||
pos_aid_src.innovation[2] = math::constrain(pos_aid_src.innovation[2], -innov_limit, innov_limit);
|
||||
pos_aid_src.innovation_rejected[2] = false;
|
||||
}
|
||||
|
||||
pos_aid_src.timestamp_sample = sample_time_us;
|
||||
}
|
||||
|
||||
void Ekf::fuseVelocity(estimator_aid_source_3d_s& vel_aid_src)
|
||||
{
|
||||
// vx & vy
|
||||
if (vel_aid_src.fusion_enabled[0] && !vel_aid_src.innovation_rejected[0]
|
||||
&& vel_aid_src.fusion_enabled[1] && !vel_aid_src.innovation_rejected[1]
|
||||
) {
|
||||
for (int i = 0; i < 2; i++) {
|
||||
if (fuseVelPosHeight(vel_aid_src.innovation[i], vel_aid_src.innovation_variance[i], i)) {
|
||||
vel_aid_src.fused[i] = true;
|
||||
vel_aid_src.time_last_fuse[i] = _time_last_imu;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// vz
|
||||
if (vel_aid_src.fusion_enabled[2] && !vel_aid_src.innovation_rejected[2]) {
|
||||
if (fuseVelPosHeight(vel_aid_src.innovation[2], vel_aid_src.innovation_variance[2], 2)) {
|
||||
vel_aid_src.fused[2] = true;
|
||||
vel_aid_src.time_last_fuse[2] = _time_last_imu;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
void Ekf::fusePosition(estimator_aid_source_3d_s& pos_aid_src)
|
||||
{
|
||||
// x & y
|
||||
if (pos_aid_src.fusion_enabled[0] && !pos_aid_src.innovation_rejected[0]
|
||||
&& pos_aid_src.fusion_enabled[1] && !pos_aid_src.innovation_rejected[1]
|
||||
) {
|
||||
for (int i = 0; i < 2; i++) {
|
||||
if (fuseVelPosHeight(pos_aid_src.innovation[i], pos_aid_src.innovation_variance[i], 3 + i)) {
|
||||
pos_aid_src.fused[i] = true;
|
||||
pos_aid_src.time_last_fuse[i] = _time_last_imu;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// z
|
||||
if (pos_aid_src.fusion_enabled[2] && !pos_aid_src.innovation_rejected[2]) {
|
||||
if (fuseVelPosHeight(pos_aid_src.innovation[2], pos_aid_src.innovation_variance[2], 5)) {
|
||||
pos_aid_src.fused[2] = true;
|
||||
pos_aid_src.time_last_fuse[2] = _time_last_imu;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// Helper function that fuses a single velocity or position measurement
|
||||
bool Ekf::fuseVelPosHeight(const float innov, const float innov_var, const int obs_index)
|
||||
{
|
||||
|
||||
@@ -47,8 +47,7 @@ void Ekf::controlZeroInnovationHeadingUpdate()
|
||||
// fuse zero heading innovation during the leveling fine alignment step to keep the yaw variance low
|
||||
float innovation = 0.f;
|
||||
float obs_var = _control_status.flags.vehicle_at_rest ? 0.001f : 0.1f;
|
||||
estimator_aid_source_1d_s unused;
|
||||
fuseYaw(innovation, obs_var, unused);
|
||||
fuseYaw(innovation, obs_var);
|
||||
|
||||
_last_static_yaw = NAN;
|
||||
|
||||
@@ -62,8 +61,7 @@ void Ekf::controlZeroInnovationHeadingUpdate()
|
||||
if (!yaw_aiding && isTimedOut(_time_last_heading_fuse, (uint64_t)200'000)) {
|
||||
float innovation = wrap_pi(euler_yaw - _last_static_yaw);
|
||||
float obs_var = 0.01f;
|
||||
estimator_aid_source_1d_s unused;
|
||||
fuseYaw(innovation, obs_var, unused);
|
||||
fuseYaw(innovation, obs_var);
|
||||
}
|
||||
|
||||
} else {
|
||||
@@ -78,8 +76,7 @@ void Ekf::controlZeroInnovationHeadingUpdate()
|
||||
if (!yaw_aiding && isTimedOut(_time_last_heading_fuse, (uint64_t)200'000)) {
|
||||
float innovation = 0.f;
|
||||
float obs_var = 0.01f;
|
||||
estimator_aid_source_1d_s unused;
|
||||
fuseYaw(innovation, obs_var, unused);
|
||||
fuseYaw(innovation, obs_var);
|
||||
}
|
||||
|
||||
_last_static_yaw = NAN;
|
||||
|
||||
+117
-137
@@ -594,7 +594,7 @@ void EKF2::Run()
|
||||
perf_set_elapsed(_ecl_ekf_update_full_perf, hrt_elapsed_time(&ekf_update_start));
|
||||
|
||||
PublishLocalPosition(now);
|
||||
PublishOdometry(now);
|
||||
PublishOdometry(now, imu_sample_new);
|
||||
PublishGlobalPosition(now);
|
||||
PublishWindEstimate(now);
|
||||
|
||||
@@ -650,22 +650,10 @@ void EKF2::PublishAidSourceStatus(const hrt_abstime ×tamp)
|
||||
// fake position
|
||||
PublishAidSourceStatus(_ekf.aid_src_fake_pos(), _status_fake_pos_pub_last, _estimator_aid_src_fake_pos_pub);
|
||||
|
||||
// EV yaw
|
||||
PublishAidSourceStatus(_ekf.aid_src_ev_yaw(), _status_ev_yaw_pub_last, _estimator_aid_src_ev_yaw_pub);
|
||||
|
||||
// GNSS yaw/velocity/position
|
||||
PublishAidSourceStatus(_ekf.aid_src_gnss_yaw(), _status_gnss_yaw_pub_last, _estimator_aid_src_gnss_yaw_pub);
|
||||
// GNSS velocity & position
|
||||
PublishAidSourceStatus(_ekf.aid_src_gnss_vel(), _status_gnss_vel_pub_last, _estimator_aid_src_gnss_vel_pub);
|
||||
PublishAidSourceStatus(_ekf.aid_src_gnss_pos(), _status_gnss_pos_pub_last, _estimator_aid_src_gnss_pos_pub);
|
||||
|
||||
// mag heading
|
||||
PublishAidSourceStatus(_ekf.aid_src_mag_heading(), _status_mag_heading_pub_last, _estimator_aid_src_mag_heading_pub);
|
||||
|
||||
// mag 3d
|
||||
PublishAidSourceStatus(_ekf.aid_src_mag(), _status_mag_pub_last, _estimator_aid_src_mag_pub);
|
||||
|
||||
// aux velocity
|
||||
PublishAidSourceStatus(_ekf.aid_src_aux_vel(), _status_aux_vel_pub_last, _estimator_aid_src_aux_vel_pub);
|
||||
}
|
||||
|
||||
void EKF2::PublishAttitude(const hrt_abstime ×tamp)
|
||||
@@ -1059,43 +1047,72 @@ void EKF2::PublishLocalPosition(const hrt_abstime ×tamp)
|
||||
_local_position_pub.publish(lpos);
|
||||
}
|
||||
|
||||
void EKF2::PublishOdometry(const hrt_abstime ×tamp)
|
||||
void EKF2::PublishOdometry(const hrt_abstime ×tamp, const imuSample &imu)
|
||||
{
|
||||
// generate vehicle odometry data
|
||||
vehicle_odometry_s odom;
|
||||
odom.timestamp_sample = timestamp;
|
||||
|
||||
// position
|
||||
odom.pose_frame = vehicle_odometry_s::POSE_FRAME_NED;
|
||||
_ekf.getPosition().copyTo(odom.position);
|
||||
odom.local_frame = vehicle_odometry_s::LOCAL_FRAME_NED;
|
||||
|
||||
// orientation quaternion
|
||||
// Vehicle odometry position
|
||||
const Vector3f position{_ekf.getPosition()};
|
||||
odom.x = position(0);
|
||||
odom.y = position(1);
|
||||
odom.z = position(2);
|
||||
|
||||
// Vehicle odometry linear velocity
|
||||
odom.velocity_frame = vehicle_odometry_s::LOCAL_FRAME_FRD;
|
||||
const Vector3f velocity{_ekf.getVelocity()};
|
||||
odom.vx = velocity(0);
|
||||
odom.vy = velocity(1);
|
||||
odom.vz = velocity(2);
|
||||
|
||||
// Vehicle odometry quaternion
|
||||
_ekf.getQuaternion().copyTo(odom.q);
|
||||
|
||||
// velocity
|
||||
odom.velocity_frame = vehicle_odometry_s::VELOCITY_FRAME_NED;
|
||||
_ekf.getVelocity().copyTo(odom.velocity);
|
||||
// Vehicle odometry angular rates
|
||||
const Vector3f gyro_bias{_ekf.getGyroBias()};
|
||||
const Vector3f rates{imu.delta_ang / imu.delta_ang_dt};
|
||||
odom.rollspeed = rates(0) - gyro_bias(0);
|
||||
odom.pitchspeed = rates(1) - gyro_bias(1);
|
||||
odom.yawspeed = rates(2) - gyro_bias(2);
|
||||
|
||||
// angular_velocity
|
||||
const Vector3f rates{_ekf.get_imu_sample_newest().delta_ang / _ekf.get_imu_sample_newest().delta_ang_dt};
|
||||
const Vector3f angular_velocity = rates - _ekf.getGyroBias();
|
||||
angular_velocity.copyTo(odom.angular_velocity);
|
||||
// get the covariance matrix size
|
||||
static constexpr size_t POS_URT_SIZE = sizeof(odom.pose_covariance) / sizeof(odom.pose_covariance[0]);
|
||||
static constexpr size_t VEL_URT_SIZE = sizeof(odom.velocity_covariance) / sizeof(odom.velocity_covariance[0]);
|
||||
|
||||
// velocity covariances
|
||||
_ekf.velocity_covariances().diag().copyTo(odom.velocity_variance);
|
||||
// Get covariances to vehicle odometry
|
||||
float covariances[24];
|
||||
_ekf.covariances_diagonal().copyTo(covariances);
|
||||
|
||||
// position covariances
|
||||
_ekf.position_covariances().diag().copyTo(odom.position_variance);
|
||||
// initially set pose covariances to 0
|
||||
for (size_t i = 0; i < POS_URT_SIZE; i++) {
|
||||
odom.pose_covariance[i] = 0.0;
|
||||
}
|
||||
|
||||
// orientation covariance
|
||||
_ekf.orientation_covariances_euler().diag().copyTo(odom.orientation_variance);
|
||||
// set the position variances
|
||||
odom.pose_covariance[odom.COVARIANCE_MATRIX_X_VARIANCE] = covariances[7];
|
||||
odom.pose_covariance[odom.COVARIANCE_MATRIX_Y_VARIANCE] = covariances[8];
|
||||
odom.pose_covariance[odom.COVARIANCE_MATRIX_Z_VARIANCE] = covariances[9];
|
||||
|
||||
// TODO: implement propagation from quaternion covariance to Euler angle covariance
|
||||
// by employing the covariance law
|
||||
|
||||
// initially set velocity covariances to 0
|
||||
for (size_t i = 0; i < VEL_URT_SIZE; i++) {
|
||||
odom.velocity_covariance[i] = 0.0;
|
||||
}
|
||||
|
||||
// set the linear velocity variances
|
||||
odom.velocity_covariance[odom.COVARIANCE_MATRIX_VX_VARIANCE] = covariances[4];
|
||||
odom.velocity_covariance[odom.COVARIANCE_MATRIX_VY_VARIANCE] = covariances[5];
|
||||
odom.velocity_covariance[odom.COVARIANCE_MATRIX_VZ_VARIANCE] = covariances[6];
|
||||
|
||||
odom.reset_counter = _ekf.get_quat_reset_count()
|
||||
+ _ekf.get_velNE_reset_count() + _ekf.get_velD_reset_count()
|
||||
+ _ekf.get_posNE_reset_count() + _ekf.get_posD_reset_count();
|
||||
|
||||
odom.quality = 0;
|
||||
|
||||
// publish vehicle odometry data
|
||||
odom.timestamp = _replay_mode ? timestamp : hrt_absolute_time();
|
||||
_odometry_pub.publish(odom);
|
||||
@@ -1109,30 +1126,37 @@ void EKF2::PublishOdometryAligned(const hrt_abstime ×tamp, const vehicle_od
|
||||
vehicle_odometry_s aligned_ev_odom{ev_odom};
|
||||
|
||||
// Rotate external position and velocity into EKF navigation frame
|
||||
const Vector3f aligned_pos = ev_rot_mat * Vector3f(ev_odom.position);
|
||||
aligned_pos.copyTo(aligned_ev_odom.position);
|
||||
const Vector3f aligned_pos = ev_rot_mat * Vector3f(ev_odom.x, ev_odom.y, ev_odom.z);
|
||||
aligned_ev_odom.x = aligned_pos(0);
|
||||
aligned_ev_odom.y = aligned_pos(1);
|
||||
aligned_ev_odom.z = aligned_pos(2);
|
||||
|
||||
switch (ev_odom.velocity_frame) {
|
||||
case vehicle_odometry_s::VELOCITY_FRAME_BODY_FRD: {
|
||||
const Vector3f aligned_vel = Dcmf(_ekf.getQuaternion()) * Vector3f(ev_odom.velocity);
|
||||
aligned_vel.copyTo(aligned_ev_odom.velocity);
|
||||
case vehicle_odometry_s::BODY_FRAME_FRD: {
|
||||
const Vector3f aligned_vel = Dcmf(_ekf.getQuaternion()) * Vector3f(ev_odom.vx, ev_odom.vy, ev_odom.vz);
|
||||
aligned_ev_odom.vx = aligned_vel(0);
|
||||
aligned_ev_odom.vy = aligned_vel(1);
|
||||
aligned_ev_odom.vz = aligned_vel(2);
|
||||
break;
|
||||
}
|
||||
|
||||
case vehicle_odometry_s::VELOCITY_FRAME_FRD: {
|
||||
const Vector3f aligned_vel = ev_rot_mat * Vector3f(ev_odom.velocity);
|
||||
aligned_vel.copyTo(aligned_ev_odom.velocity);
|
||||
case vehicle_odometry_s::LOCAL_FRAME_FRD: {
|
||||
const Vector3f aligned_vel = ev_rot_mat * Vector3f(ev_odom.vx, ev_odom.vy, ev_odom.vz);
|
||||
aligned_ev_odom.vx = aligned_vel(0);
|
||||
aligned_ev_odom.vy = aligned_vel(1);
|
||||
aligned_ev_odom.vz = aligned_vel(2);
|
||||
break;
|
||||
}
|
||||
}
|
||||
|
||||
aligned_ev_odom.velocity_frame = vehicle_odometry_s::VELOCITY_FRAME_NED;
|
||||
aligned_ev_odom.velocity_frame = vehicle_odometry_s::LOCAL_FRAME_NED;
|
||||
|
||||
// Compute orientation in EKF navigation frame
|
||||
Quatf ev_quat_aligned = quat_ev2ekf * Quatf(ev_odom.q);
|
||||
Quatf ev_quat_aligned = quat_ev2ekf * Quatf(ev_odom.q) ;
|
||||
ev_quat_aligned.normalize();
|
||||
|
||||
ev_quat_aligned.copyTo(aligned_ev_odom.q);
|
||||
quat_ev2ekf.copyTo(aligned_ev_odom.q_offset);
|
||||
|
||||
aligned_ev_odom.timestamp = _replay_mode ? timestamp : hrt_absolute_time();
|
||||
_estimator_visual_odometry_aligned_pub.publish(aligned_ev_odom);
|
||||
@@ -1344,6 +1368,9 @@ void EKF2::PublishStatusFlags(const hrt_abstime ×tamp)
|
||||
status_flags.reject_ver_vel = _ekf.innov_check_fail_status_flags().reject_ver_vel;
|
||||
status_flags.reject_hor_pos = _ekf.innov_check_fail_status_flags().reject_hor_pos;
|
||||
status_flags.reject_ver_pos = _ekf.innov_check_fail_status_flags().reject_ver_pos;
|
||||
status_flags.reject_mag_x = _ekf.innov_check_fail_status_flags().reject_mag_x;
|
||||
status_flags.reject_mag_y = _ekf.innov_check_fail_status_flags().reject_mag_y;
|
||||
status_flags.reject_mag_z = _ekf.innov_check_fail_status_flags().reject_mag_z;
|
||||
status_flags.reject_yaw = _ekf.innov_check_fail_status_flags().reject_yaw;
|
||||
status_flags.reject_airspeed = _ekf.innov_check_fail_status_flags().reject_airspeed;
|
||||
status_flags.reject_sideslip = _ekf.innov_check_fail_status_flags().reject_sideslip;
|
||||
@@ -1530,8 +1557,8 @@ void EKF2::UpdateAuxVelSample(ekf2_timestamps_s &ekf2_timestamps)
|
||||
// velocity of vehicle relative to target has opposite sign to target relative to vehicle
|
||||
auxVelSample auxvel_sample{
|
||||
.time_us = landing_target_pose.timestamp,
|
||||
.vel = Vector3f{-landing_target_pose.vx_rel, -landing_target_pose.vy_rel, NAN},
|
||||
.velVar = Vector3f{landing_target_pose.cov_vx_rel, landing_target_pose.cov_vy_rel, NAN},
|
||||
.vel = Vector3f{-landing_target_pose.vx_rel, -landing_target_pose.vy_rel, 0.0f},
|
||||
.velVar = Vector3f{landing_target_pose.cov_vx_rel, landing_target_pose.cov_vy_rel, 0.0f},
|
||||
};
|
||||
_ekf.setAuxVelData(auxvel_sample);
|
||||
}
|
||||
@@ -1600,122 +1627,77 @@ bool EKF2::UpdateExtVisionSample(ekf2_timestamps_s &ekf2_timestamps, vehicle_odo
|
||||
}
|
||||
|
||||
extVisionSample ev_data{};
|
||||
ev_data.pos.setNaN();
|
||||
ev_data.vel.setNaN();
|
||||
ev_data.quat.setNaN();
|
||||
|
||||
// if error estimates are unavailable, use parameter defined defaults
|
||||
|
||||
// check for valid velocity data
|
||||
if (PX4_ISFINITE(ev_odom.velocity[0]) && PX4_ISFINITE(ev_odom.velocity[1]) && PX4_ISFINITE(ev_odom.velocity[2])) {
|
||||
bool velocity_valid = true;
|
||||
if (PX4_ISFINITE(ev_odom.vx) && PX4_ISFINITE(ev_odom.vy) && PX4_ISFINITE(ev_odom.vz)) {
|
||||
ev_data.vel(0) = ev_odom.vx;
|
||||
ev_data.vel(1) = ev_odom.vy;
|
||||
ev_data.vel(2) = ev_odom.vz;
|
||||
|
||||
switch (ev_odom.velocity_frame) {
|
||||
// case vehicle_odometry_s::VELOCITY_FRAME_NED:
|
||||
// ev_data.vel_frame = VelocityFrame::LOCAL_FRAME_NED;
|
||||
// break;
|
||||
|
||||
case vehicle_odometry_s::VELOCITY_FRAME_FRD:
|
||||
ev_data.vel_frame = VelocityFrame::LOCAL_FRAME_FRD;
|
||||
break;
|
||||
|
||||
case vehicle_odometry_s::VELOCITY_FRAME_BODY_FRD:
|
||||
if (ev_odom.velocity_frame == vehicle_odometry_s::BODY_FRAME_FRD) {
|
||||
ev_data.vel_frame = VelocityFrame::BODY_FRAME_FRD;
|
||||
break;
|
||||
|
||||
default:
|
||||
velocity_valid = false;
|
||||
break;
|
||||
} else {
|
||||
ev_data.vel_frame = VelocityFrame::LOCAL_FRAME_FRD;
|
||||
}
|
||||
|
||||
if (velocity_valid) {
|
||||
ev_data.vel(0) = ev_odom.velocity[0];
|
||||
ev_data.vel(1) = ev_odom.velocity[1];
|
||||
ev_data.vel(2) = ev_odom.velocity[2];
|
||||
// velocity measurement error from ev_data or parameters
|
||||
float param_evv_noise_var = sq(_param_ekf2_evv_noise.get());
|
||||
|
||||
const float evv_noise_var = sq(_param_ekf2_evv_noise.get());
|
||||
if (!_param_ekf2_ev_noise_md.get() && PX4_ISFINITE(ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VX_VARIANCE])
|
||||
&& PX4_ISFINITE(ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VY_VARIANCE])
|
||||
&& PX4_ISFINITE(ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VZ_VARIANCE])) {
|
||||
ev_data.velCov(0, 0) = ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VX_VARIANCE];
|
||||
ev_data.velCov(0, 1) = ev_data.velCov(1, 0) = ev_odom.velocity_covariance[1];
|
||||
ev_data.velCov(0, 2) = ev_data.velCov(2, 0) = ev_odom.velocity_covariance[2];
|
||||
ev_data.velCov(1, 1) = ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VY_VARIANCE];
|
||||
ev_data.velCov(1, 2) = ev_data.velCov(2, 1) = ev_odom.velocity_covariance[7];
|
||||
ev_data.velCov(2, 2) = ev_odom.velocity_covariance[ev_odom.COVARIANCE_MATRIX_VZ_VARIANCE];
|
||||
|
||||
// velocity measurement error from ev_data or parameters
|
||||
if (!_param_ekf2_ev_noise_md.get() &&
|
||||
PX4_ISFINITE(ev_odom.velocity_variance[0]) &&
|
||||
PX4_ISFINITE(ev_odom.velocity_variance[1]) &&
|
||||
PX4_ISFINITE(ev_odom.velocity_variance[2])) {
|
||||
|
||||
ev_data.velVar(0) = fmaxf(evv_noise_var, ev_odom.velocity_variance[0]);
|
||||
ev_data.velVar(1) = fmaxf(evv_noise_var, ev_odom.velocity_variance[1]);
|
||||
ev_data.velVar(2) = fmaxf(evv_noise_var, ev_odom.velocity_variance[2]);
|
||||
|
||||
} else {
|
||||
ev_data.velVar.setAll(evv_noise_var);
|
||||
}
|
||||
|
||||
new_ev_odom = true;
|
||||
} else {
|
||||
ev_data.velCov = matrix::eye<float, 3>() * param_evv_noise_var;
|
||||
}
|
||||
|
||||
new_ev_odom = true;
|
||||
}
|
||||
|
||||
// check for valid position data
|
||||
if (PX4_ISFINITE(ev_odom.position[0]) && PX4_ISFINITE(ev_odom.position[1]) && PX4_ISFINITE(ev_odom.position[2])) {
|
||||
if (PX4_ISFINITE(ev_odom.x) && PX4_ISFINITE(ev_odom.y) && PX4_ISFINITE(ev_odom.z)) {
|
||||
ev_data.pos(0) = ev_odom.x;
|
||||
ev_data.pos(1) = ev_odom.y;
|
||||
ev_data.pos(2) = ev_odom.z;
|
||||
|
||||
bool position_valid = true;
|
||||
float param_evp_noise_var = sq(_param_ekf2_evp_noise.get());
|
||||
|
||||
// switch (ev_odom.pose_frame) {
|
||||
// case vehicle_odometry_s::POSE_FRAME_NED:
|
||||
// ev_data.pos_frame = PositionFrame::LOCAL_FRAME_NED;
|
||||
// break;
|
||||
// position measurement error from ev_data or parameters
|
||||
if (!_param_ekf2_ev_noise_md.get() && PX4_ISFINITE(ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_X_VARIANCE])
|
||||
&& PX4_ISFINITE(ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_Y_VARIANCE])
|
||||
&& PX4_ISFINITE(ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_Z_VARIANCE])) {
|
||||
ev_data.posVar(0) = fmaxf(param_evp_noise_var, ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_X_VARIANCE]);
|
||||
ev_data.posVar(1) = fmaxf(param_evp_noise_var, ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_Y_VARIANCE]);
|
||||
ev_data.posVar(2) = fmaxf(param_evp_noise_var, ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_Z_VARIANCE]);
|
||||
|
||||
// case vehicle_odometry_s::POSE_FRAME_FRD:
|
||||
// ev_data.pos_frame = PositionFrame::LOCAL_FRAME_FRD;
|
||||
// break;
|
||||
|
||||
// default:
|
||||
// position_valid = false;
|
||||
// break;
|
||||
// }
|
||||
|
||||
if (position_valid) {
|
||||
ev_data.pos(0) = ev_odom.position[0];
|
||||
ev_data.pos(1) = ev_odom.position[1];
|
||||
ev_data.pos(2) = ev_odom.position[2];
|
||||
|
||||
const float evp_noise_var = sq(_param_ekf2_evp_noise.get());
|
||||
|
||||
// position measurement error from ev_data or parameters
|
||||
if (!_param_ekf2_ev_noise_md.get() &&
|
||||
PX4_ISFINITE(ev_odom.position_variance[0]) &&
|
||||
PX4_ISFINITE(ev_odom.position_variance[1]) &&
|
||||
PX4_ISFINITE(ev_odom.position_variance[2])
|
||||
) {
|
||||
ev_data.posVar(0) = fmaxf(evp_noise_var, ev_odom.position_variance[0]);
|
||||
ev_data.posVar(1) = fmaxf(evp_noise_var, ev_odom.position_variance[1]);
|
||||
ev_data.posVar(2) = fmaxf(evp_noise_var, ev_odom.position_variance[2]);
|
||||
|
||||
} else {
|
||||
ev_data.posVar.setAll(evp_noise_var);
|
||||
}
|
||||
|
||||
new_ev_odom = true;
|
||||
} else {
|
||||
ev_data.posVar.setAll(param_evp_noise_var);
|
||||
}
|
||||
|
||||
new_ev_odom = true;
|
||||
}
|
||||
|
||||
// check for valid orientation data
|
||||
if ((PX4_ISFINITE(ev_odom.q[0]) && PX4_ISFINITE(ev_odom.q[1])
|
||||
&& PX4_ISFINITE(ev_odom.q[2]) && PX4_ISFINITE(ev_odom.q[3]))
|
||||
&& ((fabsf(ev_odom.q[0]) > 0.f) || (fabsf(ev_odom.q[1]) > 0.f)
|
||||
|| (fabsf(ev_odom.q[2]) > 0.f) || (fabsf(ev_odom.q[3]) > 0.f))
|
||||
) {
|
||||
if (PX4_ISFINITE(ev_odom.q[0])) {
|
||||
ev_data.quat = Quatf(ev_odom.q);
|
||||
ev_data.quat.normalize();
|
||||
|
||||
// orientation measurement error from ev_data or parameters
|
||||
const float eva_noise_var = sq(_param_ekf2_eva_noise.get());
|
||||
float param_eva_noise_var = sq(_param_ekf2_eva_noise.get());
|
||||
|
||||
if (!_param_ekf2_ev_noise_md.get() &&
|
||||
PX4_ISFINITE(ev_odom.orientation_variance[2])
|
||||
) {
|
||||
ev_data.angVar = fmaxf(eva_noise_var, ev_odom.orientation_variance[2]);
|
||||
if (!_param_ekf2_ev_noise_md.get() && PX4_ISFINITE(ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_YAW_VARIANCE])) {
|
||||
ev_data.angVar = fmaxf(param_eva_noise_var, ev_odom.pose_covariance[ev_odom.COVARIANCE_MATRIX_YAW_VARIANCE]);
|
||||
|
||||
} else {
|
||||
ev_data.angVar = eva_noise_var;
|
||||
ev_data.angVar = param_eva_noise_var;
|
||||
}
|
||||
|
||||
new_ev_odom = true;
|
||||
@@ -1723,8 +1705,6 @@ bool EKF2::UpdateExtVisionSample(ekf2_timestamps_s &ekf2_timestamps, vehicle_odo
|
||||
|
||||
// use timestamp from external computer, clocks are synchronized when using MAVROS
|
||||
ev_data.time_us = ev_odom.timestamp_sample;
|
||||
ev_data.reset_counter = ev_odom.reset_counter;
|
||||
//ev_data.quality = ev_odom.quality;
|
||||
|
||||
if (new_ev_odom) {
|
||||
_ekf.setExtVisionData(ev_data);
|
||||
@@ -2260,7 +2240,7 @@ int EKF2::print_usage(const char *reason)
|
||||
### Description
|
||||
Attitude and position estimator using an Extended Kalman Filter. It is used for Multirotors and Fixed-Wing.
|
||||
|
||||
The documentation can be found on the [ECL/EKF Overview & Tuning](https://docs.px4.io/main/en/advanced_config/tuning_the_ecl_ekf.html) page.
|
||||
The documentation can be found on the [ECL/EKF Overview & Tuning](https://docs.px4.io/master/en/advanced_config/tuning_the_ecl_ekf.html) page.
|
||||
|
||||
ekf2 can be started in replay mode (`-r`): in this mode, it does not access the system time, but only uses the
|
||||
timestamps from the sensor topics.
|
||||
|
||||
@@ -144,7 +144,7 @@ private:
|
||||
void PublishInnovationTestRatios(const hrt_abstime ×tamp);
|
||||
void PublishInnovationVariances(const hrt_abstime ×tamp);
|
||||
void PublishLocalPosition(const hrt_abstime ×tamp);
|
||||
void PublishOdometry(const hrt_abstime ×tamp);
|
||||
void PublishOdometry(const hrt_abstime ×tamp, const imuSample &imu);
|
||||
void PublishOdometryAligned(const hrt_abstime ×tamp, const vehicle_odometry_s &ev_odom);
|
||||
void PublishOpticalFlowVel(const hrt_abstime ×tamp);
|
||||
void PublishSensorBias(const hrt_abstime ×tamp);
|
||||
@@ -257,17 +257,9 @@ private:
|
||||
|
||||
hrt_abstime _status_fake_pos_pub_last{0};
|
||||
|
||||
hrt_abstime _status_ev_yaw_pub_last{0};
|
||||
|
||||
hrt_abstime _status_gnss_yaw_pub_last{0};
|
||||
hrt_abstime _status_gnss_vel_pub_last{0};
|
||||
hrt_abstime _status_gnss_pos_pub_last{0};
|
||||
|
||||
hrt_abstime _status_mag_pub_last{0};
|
||||
hrt_abstime _status_mag_heading_pub_last{0};
|
||||
|
||||
hrt_abstime _status_aux_vel_pub_last{0};
|
||||
|
||||
float _last_baro_bias_published{};
|
||||
|
||||
float _airspeed_scale_factor{1.0f}; ///< scale factor correction applied to airspeed measurements
|
||||
@@ -332,17 +324,9 @@ private:
|
||||
|
||||
uORB::PublicationMulti<estimator_aid_source_2d_s> _estimator_aid_src_fake_pos_pub{ORB_ID(estimator_aid_src_fake_pos)};
|
||||
|
||||
uORB::PublicationMulti<estimator_aid_source_1d_s> _estimator_aid_src_gnss_yaw_pub{ORB_ID(estimator_aid_src_gnss_yaw)};
|
||||
uORB::PublicationMulti<estimator_aid_source_3d_s> _estimator_aid_src_gnss_vel_pub{ORB_ID(estimator_aid_src_gnss_vel)};
|
||||
uORB::PublicationMulti<estimator_aid_source_3d_s> _estimator_aid_src_gnss_pos_pub{ORB_ID(estimator_aid_src_gnss_pos)};
|
||||
|
||||
uORB::PublicationMulti<estimator_aid_source_1d_s> _estimator_aid_src_mag_heading_pub{ORB_ID(estimator_aid_src_mag_heading)};
|
||||
uORB::PublicationMulti<estimator_aid_source_3d_s> _estimator_aid_src_mag_pub{ORB_ID(estimator_aid_src_mag)};
|
||||
|
||||
uORB::PublicationMulti<estimator_aid_source_1d_s> _estimator_aid_src_ev_yaw_pub{ORB_ID(estimator_aid_src_ev_yaw)};
|
||||
|
||||
uORB::PublicationMulti<estimator_aid_source_3d_s> _estimator_aid_src_aux_vel_pub{ORB_ID(estimator_aid_src_aux_vel)};
|
||||
|
||||
// publications with topic dependent on multi-mode
|
||||
uORB::PublicationMulti<vehicle_attitude_s> _attitude_pub;
|
||||
uORB::PublicationMulti<vehicle_local_position_s> _local_position_pub;
|
||||
|
||||
@@ -26,7 +26,12 @@ void Vio::setData(const extVisionSample &vio_data)
|
||||
|
||||
void Vio::setVelocityVariance(const Vector3f &velVar)
|
||||
{
|
||||
_vio_data.velVar = velVar;
|
||||
setVelocityCovariance(matrix::diag(velVar));
|
||||
}
|
||||
|
||||
void Vio::setVelocityCovariance(const Matrix3f &velCov)
|
||||
{
|
||||
_vio_data.velCov = velCov;
|
||||
}
|
||||
|
||||
void Vio::setPositionVariance(const Vector3f &posVar)
|
||||
@@ -71,7 +76,7 @@ extVisionSample Vio::dataAtRest()
|
||||
vio_data.vel = Vector3f{0.0f, 0.0f, 0.0f};;
|
||||
vio_data.quat = Quatf{1.0f, 0.0f, 0.0f, 0.0f};
|
||||
vio_data.posVar = Vector3f{0.1f, 0.1f, 0.1f};
|
||||
vio_data.velVar = Vector3f{0.1f, 0.1f, 0.1f};
|
||||
vio_data.velCov = matrix::eye<float, 3>() * 0.1f;
|
||||
vio_data.angVar = 0.05f;
|
||||
vio_data.vel_frame = VelocityFrame::LOCAL_FRAME_FRD;
|
||||
return vio_data;
|
||||
|
||||
@@ -53,6 +53,7 @@ public:
|
||||
|
||||
void setData(const extVisionSample &vio_data);
|
||||
void setVelocityVariance(const Vector3f &velVar);
|
||||
void setVelocityCovariance(const Matrix3f &velCov);
|
||||
void setPositionVariance(const Vector3f &posVar);
|
||||
void setAngularVariance(float angVar);
|
||||
void setVelocity(const Vector3f &vel);
|
||||
|
||||
@@ -223,7 +223,7 @@ TEST_F(EkfBasicsTest, reset_ekf_global_origin_gps_initialized)
|
||||
_sensor_simulator.setGpsLatitude(_latitude_new);
|
||||
_sensor_simulator.setGpsLongitude(_longitude_new);
|
||||
_sensor_simulator.setGpsAltitude(_altitude_new);
|
||||
_sensor_simulator.runSeconds(5);
|
||||
_sensor_simulator.runSeconds(2);
|
||||
|
||||
_ekf->getEkfGlobalOrigin(_origin_time, _latitude, _longitude, _altitude);
|
||||
|
||||
@@ -231,9 +231,8 @@ TEST_F(EkfBasicsTest, reset_ekf_global_origin_gps_initialized)
|
||||
EXPECT_DOUBLE_EQ(_longitude, _longitude_new);
|
||||
EXPECT_NEAR(_altitude, _altitude_new, 0.01f);
|
||||
|
||||
// Note: we cannot reset too far since the local position is limited to 1e6m
|
||||
_latitude_new = 14.0000005;
|
||||
_longitude_new = 109.0000005;
|
||||
_latitude_new = -15.0000005;
|
||||
_longitude_new = -115.0000005;
|
||||
_altitude_new = 1500.0;
|
||||
|
||||
_ekf->setEkfGlobalOrigin(_latitude_new, _longitude_new, _altitude_new);
|
||||
@@ -243,21 +242,16 @@ TEST_F(EkfBasicsTest, reset_ekf_global_origin_gps_initialized)
|
||||
EXPECT_DOUBLE_EQ(_longitude, _longitude_new);
|
||||
EXPECT_FLOAT_EQ(_altitude, _altitude_new);
|
||||
|
||||
_sensor_simulator.runSeconds(1);
|
||||
|
||||
float hpos = 0.f;
|
||||
float vpos = 0.f;
|
||||
float hvel = 0.f;
|
||||
float vvel = 0.f;
|
||||
float baro_vpos = 0.f;
|
||||
|
||||
// After the change of origin, the pos and vel innovations should stay small
|
||||
_ekf->getGpsVelPosInnovRatio(hvel, vvel, hpos, vpos);
|
||||
_ekf->getBaroHgtInnovRatio(baro_vpos);
|
||||
|
||||
EXPECT_NEAR(hpos, 0.f, 0.05f);
|
||||
EXPECT_NEAR(vpos, 0.f, 0.05f);
|
||||
EXPECT_NEAR(baro_vpos, 0.f, 0.05f);
|
||||
|
||||
EXPECT_NEAR(hvel, 0.f, 0.02f);
|
||||
EXPECT_NEAR(vvel, 0.f, 0.02f);
|
||||
@@ -282,8 +276,6 @@ TEST_F(EkfBasicsTest, reset_ekf_global_origin_gps_uninitialized)
|
||||
EXPECT_DOUBLE_EQ(_longitude, _longitude_new);
|
||||
EXPECT_FLOAT_EQ(_altitude, _altitude_new);
|
||||
|
||||
_sensor_simulator.runSeconds(1);
|
||||
|
||||
float hpos = 0.f;
|
||||
float vpos = 0.f;
|
||||
float hvel = 0.f;
|
||||
|
||||
@@ -276,10 +276,13 @@ TEST_F(EkfExternalVisionTest, velocityFrameBody)
|
||||
// WHEN: measurement is given in BODY-FRAME and
|
||||
// x variance is bigger than y variance
|
||||
_sensor_simulator._vio.setVelocityFrameToBody();
|
||||
|
||||
const Vector3f vel_cov_body(2.0f, 0.01f, 0.01f);
|
||||
float vel_cov_data [9] = {2.0f, 0.0f, 0.0f,
|
||||
0.0f, 0.01f, 0.0f,
|
||||
0.0f, 0.0f, 0.01f
|
||||
};
|
||||
const Matrix3f vel_cov_body(vel_cov_data);
|
||||
const Vector3f vel_body(1.0f, 0.0f, 0.0f);
|
||||
_sensor_simulator._vio.setVelocityVariance(vel_cov_body);
|
||||
_sensor_simulator._vio.setVelocityCovariance(vel_cov_body);
|
||||
_sensor_simulator._vio.setVelocity(vel_body);
|
||||
_ekf_wrapper.enableExternalVisionVelocityFusion();
|
||||
_sensor_simulator.startExternalVision();
|
||||
@@ -309,10 +312,13 @@ TEST_F(EkfExternalVisionTest, velocityFrameLocal)
|
||||
// WHEN: measurement is given in LOCAL-FRAME and
|
||||
// x variance is bigger than y variance
|
||||
_sensor_simulator._vio.setVelocityFrameToLocal();
|
||||
|
||||
const Vector3f vel_cov_earth{2.f, 0.01f, 0.01f};
|
||||
float vel_cov_data [9] = {2.0f, 0.0f, 0.0f,
|
||||
0.0f, 0.01f, 0.0f,
|
||||
0.0f, 0.0f, 0.01f
|
||||
};
|
||||
const Matrix3f vel_cov_earth(vel_cov_data);
|
||||
const Vector3f vel_earth(1.0f, 0.0f, 0.0f);
|
||||
_sensor_simulator._vio.setVelocityVariance(vel_cov_earth);
|
||||
_sensor_simulator._vio.setVelocityCovariance(vel_cov_earth);
|
||||
_sensor_simulator._vio.setVelocity(vel_earth);
|
||||
_ekf_wrapper.enableExternalVisionVelocityFusion();
|
||||
_sensor_simulator.startExternalVision();
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user