mirror of
https://gitee.com/mirrors_PX4/PX4-Autopilot.git
synced 2026-04-14 10:07:39 +08:00
1.6 KiB
1.6 KiB
Test MC_08 - DSHOT ESC
Objective
Regression test for DSHOT working with PX4
Preflight
- Ensure vehicle is using a DSHOT ESC
- Bidirectional DShot is configured (BDShot150/300/600 selected in Actuator Configuration)
- Parameter DSHOT_TEL_CFG is configured (if ESC supports telemetry)
- Parameter SDLOG_PROFILE has Debug (
5) checked
Flight Tests
❏ Takeoff in stabilized mode to ensure correct motor spin
❏ Pitch/Roll/Yaw response 1:1
❏ Throttle response 1:1
❏ Horizontal position should hold current value with stick centered
❏ Vertical position should hold current value with stick centered
❏ Throttle response set to climb/descent rate
❏ Pitch/Roll/Yaw response set to pitch/roll/yaw rates
착륙
❏ Land in either Position or Altitude mode with the throttle below 40%
❏ Upon touching ground, copter should disarm automatically within 2 seconds (default: see COM_DISARM_LAND)
예상 결과
-
Download flight logs
-
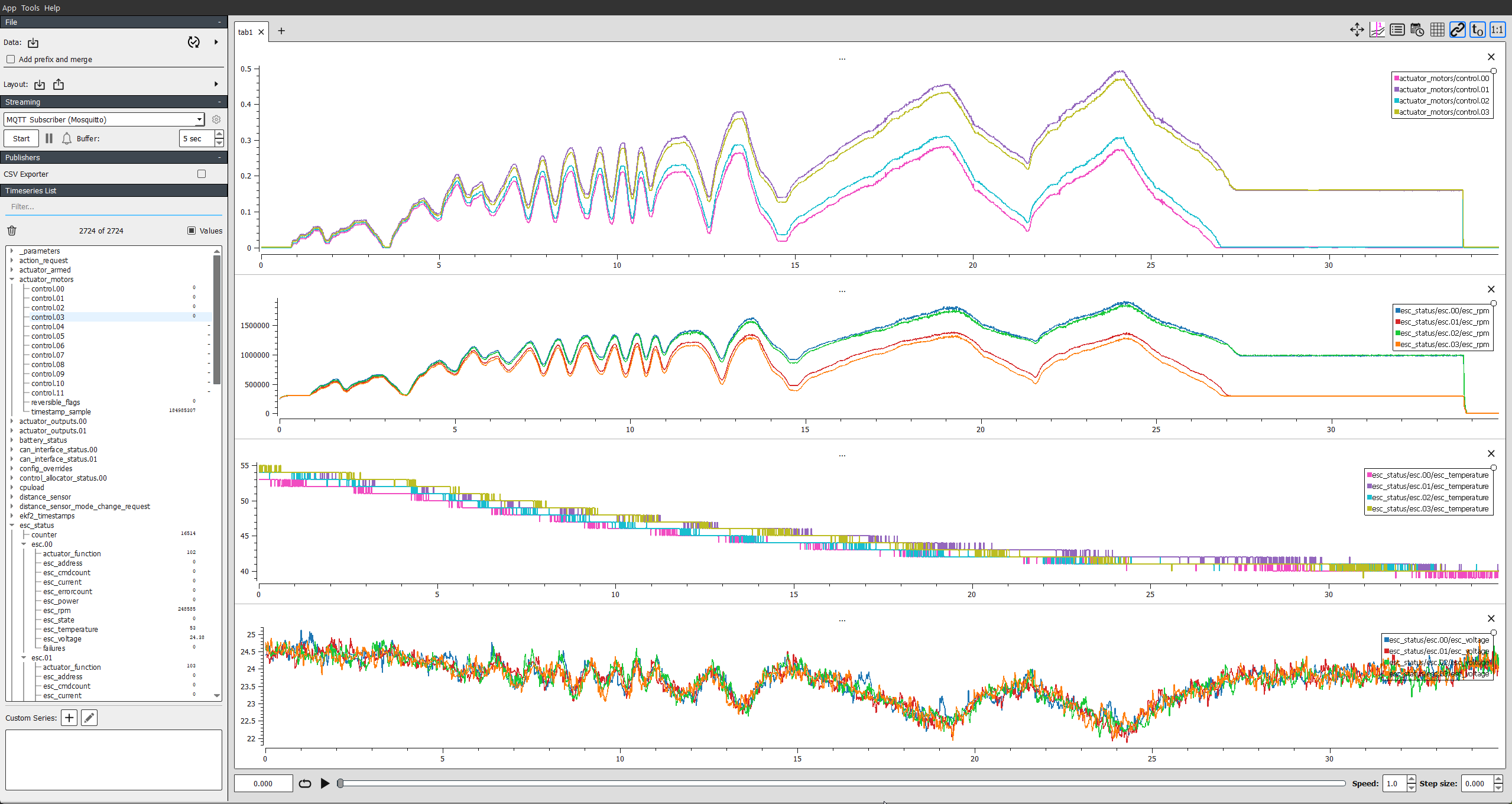
Load into Data Plot Juggler
-
Ensure data is logged for
esc_status/esc.0x/esc_rpm