PX4 Drag fusion parameter tuning algorithm
In PX4, drag fusion can be enabled in order to estimate the wind when flying a multirotor, assuming that the body vertical acceleration is produced by the rotors and that the lateral forces are produced by drag. The model assumes a combination of:
- momentum drag: created by the rotors changing the direction of the incoming air, linear to the relative airspeed. Parameter
EKF2_MCOEF - bluff body drag: created by the wetted area of the aircraft, quadratic to the relative airspeed. Parameters
EKF2_BCOEF_XandEKF2_BCOEF_Y
The python script was created to automate the tuning of the aforementioned parameters using flight test data.
How to use this script
First, a flight log with enough information is required in order to accurately estimate the parameters. The best way to do this is to fly the drone in altitude mode, accelerate to a moderate-high speed and let the drone slow-down by its own drag. Repeat the same maneuver in all directions and several times to obtain a good dataset.
/!\ NOTE: the current state of this script assumes no wind. Some modifications are required to estimate both the wind and the parameters at the same time.
Then, install the required python packages:
pip install -r requirements.txt
and run the script and give it the log file as an argument:
python drag_replay.py <logfilename.ulg>
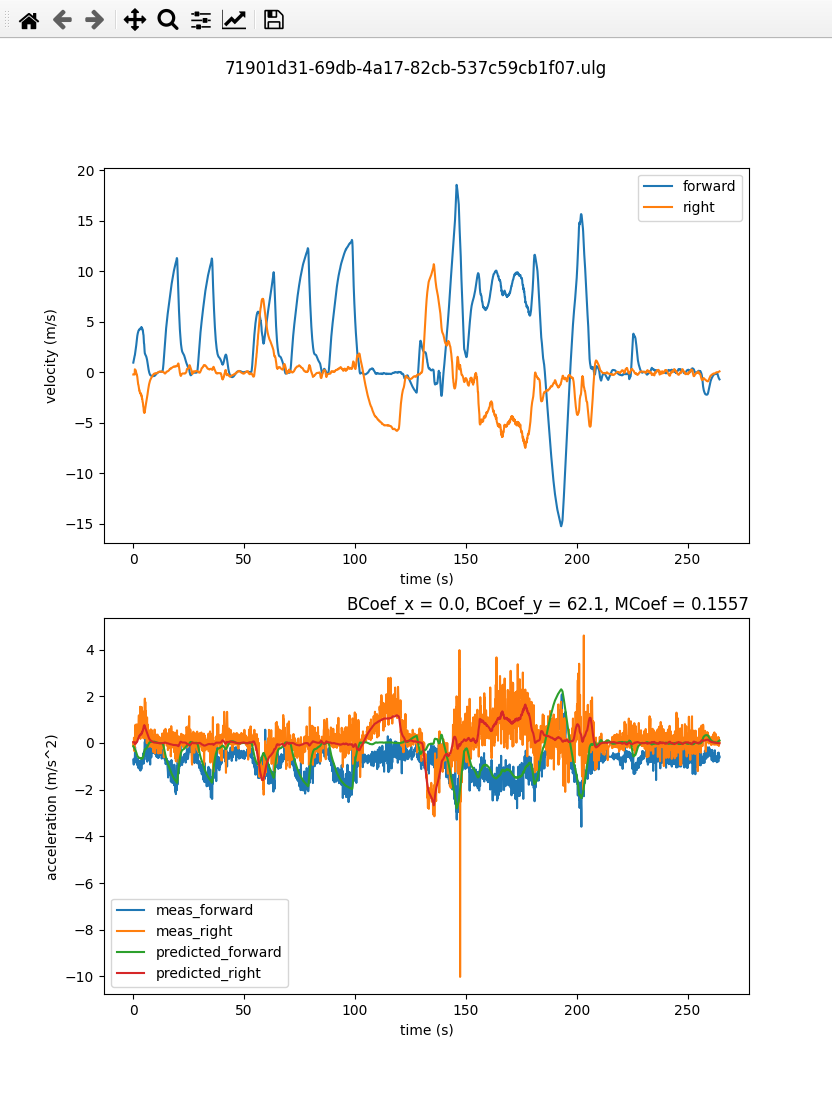
The estimated parameters are displayed in the console and the fit quality is shown in a plot:
param set EKF2_BCOEF_X 0.0
param set EKF2_BCOEF_Y 62.1
param set EKF2_MCOEF 0.16
/!\EXPERIMENTAL param set EKF2_DRAG_NOISE 0.31