# mRo Pixhawk Flight Controller (Pixhawk 1)
:::warning
PX4 не розробляє цей (або будь-який інший) автопілот.
Contact the [manufacturer](https://store.mrobotics.io/) for hardware support or compliance issues.
:::
The _mRo Pixhawk®_ is a hardware compatible version of the original [Pixhawk 1](../flight_controller/pixhawk.md). It runs PX4 on the [NuttX](https://nuttx.apache.org/) OS.
:::tip
The controller can be used as a drop-in replacement for the 3DR® [Pixhawk 1](../flight_controller/pixhawk.md).
The main difference is that it is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design, which corrects a bug that limited the original Pixhawk 1 to 1MB of flash.
:::

Assembly/setup instructions for use with PX4 are provided here: [Pixhawk Wiring Quickstart](../assembly/quick_start_pixhawk.md)
:::tip
This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md) by the PX4 maintenance and test teams.
:::
## Основні характеристики
- Мікропроцесор:
- 32-bit STM32F427 Cortex® M4 core з FPU
- 168 MHz/256 KB RAM/2 MB Flash
- 32 bit STM32F103 відмовостійкий копроцесор
- 24 MHz/8 KB RAM/64 KB Flash
- Датчики:
- ST Micro L3GD20 3-axis 16-бітний гіроскоп
- ST Micro LSM303D 3-вісний 14-бітний акселерометр / магнітометр
- Invensense® MPU 6000 3-вісний акселерометр/гіроскоп
- MEAS MS5611 барометр
- Інтерфейси:
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN
- Вхід, сумісний з приймачами Spektrum DSM / DSM2 / DSM-X® Satellite до DX8 (DX9 та вище не підтримуються)
- Futaba® S.BUS сумісний вхід та вихід
- Сигнал суми PPM
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3 та 6.6V ADC входи
- Зовнішній порт microUSB
- Система живлення:
- Ідеальний діодний контролер з автоматичним перемиканням на резервне живлення
- Сервопривід високої потужності (7 В) і готовий до великого струму
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
- Вага та розміри:
- Вага: 38г (1,31 унції)
- Ширина: 50 мм (1.96")
- Товщина: 15.5 мм (.613")
- Довжина: 81.5 мм (3.21")
## Доступність
- [Bare Bones](https://store.mrobotics.io/Genuine-PixHawk-1-Barebones-p/mro-pixhawk1-bb-mr.htm) - Just the board (useful as a 3DR Pixhawk replacement)
- [mRo Pixhawk 2.4.6 Essential Kit!](https://store.mrobotics.io/Genuine-PixHawk-Flight-Controller-p/mro-pixhawk1-minkit-mr.htm) - Everything except for telemetry radios
- [mRo Pixhawk 2.4.6 Cool Kit! (Limited edition)](https://store.mrobotics.io/product-p/mro-pixhawk1-fullkit-mr.htm) - Everything you need including telemetry radios
## Збірка прошивки
:::tip
Most users will not need to build this firmware!
It is pre-built and automatically installed by _QGroundControl_ when appropriate hardware is connected.
:::
To [build PX4](../dev_setup/building_px4.md) for this target:
```sh
make px4_fmu-v3_default
```
## Відладочні порти
### Порт Консолі
The [PX4 System Console](../debug/system_console.md) runs on the port labeled [SERIAL4/5](#serial-4-5-port).
:::tip
A convenient way to connect to the console is to use a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1), as it comes with connectors that can be used with several different Pixhawk devices.
Simply connect the 6-pos DF13 1:1 cable on the [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1) to the Pixhawk `SERIAL4/5` port.

:::
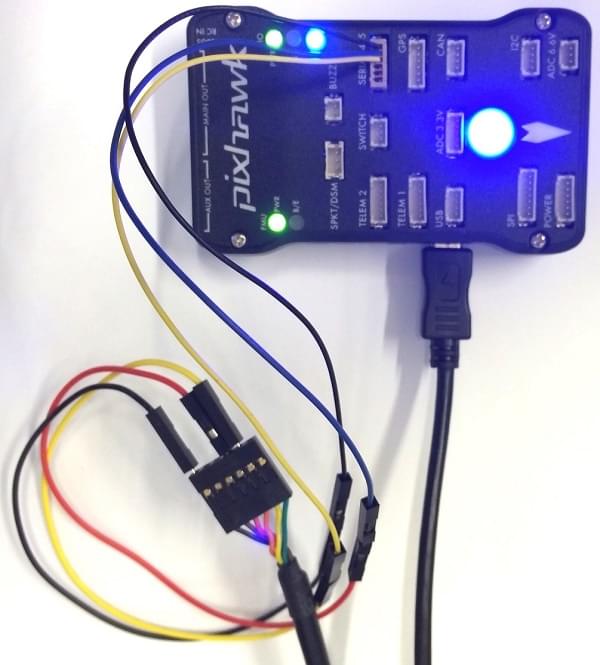
The pinout is standard serial pinout, designed to connect to a [3.3V FTDI](https://www.digikey.com/en/products/detail/TTL-232R-3V3/768-1015-ND/1836393) cable (5V tolerant).
| 3DR Pixhawk 1 | | FTDI | |
| ------------- | ---------------------------- | ---- | ----------------------------------- |
| 1 | +5V (red) | | N/C |
| 2 | S4 Tx | | N/C |
| 3 | S4 Rx | | N/C |
| 4 | S5 Tx | 5 | FTDI RX (yellow) |
| 5 | S5 Rx | 4 | FTDI TX (orange) |
| 6 | GND | 1 | FTDI GND (black) |
The wiring for an FTDI cable to a 6-pos DF13 1:1 connector is shown in the figure below.

The complete wiring is shown below.
:::info
For information on how to _use_ the console see: [System Console](../debug/system_console.md).
:::
### SWD Port
The [SWD](../debug/swd_debug.md) (JTAG) ports are hidden under the cover (which must be removed for hardware debugging).
There are separate ports for FMU and IO, as highlighted below.

The ports are ARM 10-pin JTAG connectors, which you will probably have to solder.
The pinout for the ports is shown below (the square markers in the corners above indicates pin 1).

:::info
All Pixhawk FMUv2 boards have a similar SWD port.
:::
## Схема розташування виводів
#### TELEM1, TELEM2 порти
| Pin | Сигнал | Вольтаж |
| -------------------------- | ---------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
#### Порт GPS
| Pin | Сигнал | Вольтаж |
| -------------------------- | --------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CAN2 TX | +3.3V |
| 5 (blk) | CAN2 RX | +3.3V |
| 6 (blk) | GND | GND |
#### SERIAL 4/5 port
Due to space constraints two ports are on one connector.
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (#4) | +3.3V |
| 3 (blk) | RX (#4) | +3.3V |
| 4 (blk) | TX (#5) | +3.3V |
| 5 (blk) | RX (#5) | +3.3V |
| 6 (blk) | GND | GND |
#### ADC 6.6V
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | --------------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +6.6V |
| 3 (blk) | GND | GND |
#### ADC 3.3V
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | ------------------------ |
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | до +3.3V |
| 3 (blk) | GND | GND |
| 4 (blk) | ADC IN | до +3.3V |
| 5 (blk) | GND | GND |
#### I2C
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | ------------------------------------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
#### CAN
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------- | ------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
#### SPI
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------------------------------------------------------ | -------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | SPI_EXT_SCK | +3.3 |
| 3 (blk) | SPI_EXT_MISO | +3.3 |
| 4 (blk) | SPI_EXT_MOSI | +3.3 |
| 5 (blk) | !SPI_EXT_NSS | +3.3 |
| 6 (blk) | !GPIO_EXT | +3.3 |
| 7 (blk) | GND | GND |
#### POWER
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
#### SWITCH
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------------------------------------- | --------------------- |
| 1 (red) | VCC | +3.3V |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | SAFETY | GND |
## Налаштування послідовного порту
| UART | Пристрій | Порт |
| ------ | ---------- | --------------------------------------------- |
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | | |
| UART7 | CONSOLE | |
| UART8 | SERIAL4 | |
## Налаштування послідовного порту
| UART | Пристрій | Порт |
| ------ | ---------- | --------------------------------------------- |
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | | |
| UART7 | CONSOLE | |
| UART8 | SERIAL4 | |
## Креслення
The board is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design.
- [FMUv3 schematic](https://github.com/pixhawk/Hardware/raw/master/FMUv3_REV_D/Schematic%20Print/Schematic%20Prints.PDF) -- Schematic and layout
:::info
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::