# 3DR Pixhawk 1 Flight Controller (знято з виробництва)
:::warning
This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
You can use the [mRo Pixhawk](../flight_controller/mro_pixhawk.md) as a drop-in replacement.
:::
:::warning
PX4 не розробляє цей (або будь-який інший) автопілот.
Звертайтесь до виробника з питань щодо підтримки або відповідності.
:::
The _3DR Pixhawk® 1_ autopilot is a popular general purpose flight controller based on the [Pixhawk-project](https://pixhawk.org/) **FMUv2** open hardware design (it combines the functionality of the PX4FMU + PX4IO).
It runs PX4 on the [NuttX](https://nuttx.apache.org/) OS.

Assembly/setup instructions for use with PX4 are provided here: [Pixhawk Wiring Quickstart](../assembly/quick_start_pixhawk.md)
## Основні характеристики
- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 180 MHz ARM® Cortex® M4 з одинарною точністю FPU
- RAM: 256 KB SRAM (L1)
- Failsafe System-on-Chip: STM32F100
- CPU: 24 MHz ARM Cortex M3
- RAM: 8 KB SRAM
- Wifi: ESP8266 зовнішній
- GPS: u-blox® 7/8 (Hobbyking®) / u-blox 6 (3D Robotics)
- Optical flow: [PX4 Flow unit](../sensor/px4flow.md)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - багатоколірний світлодіод
- Потужний багатотональний п'єзозвуковий індикатор
- Карта microSD для високошвидкісної фіксації даних протягом тривалого періоду часу
Підключення
- 1x I2C
- 1x CAN (2x опційно)
- 1x ADC
- 4x UART (2x з контролем потоку)
- 1x Консоль
- 8x ШІМ з ручним управлінням
- 6x PWM / GPIO / PWM вхід
- S.BUS / PPM / Spektrum вхід
- S.BUS вивід
# Де купити
Ця плата, що оригінально вироблялася компанією 3DR®, була стандартною платформою мікроконтролера для PX4®. While the board is no longer manufactured by 3DR, you can use the [mRo Pixhawk](../flight_controller/mro_pixhawk.md) as a drop-in replacement.
Замовте mRo Pixhawk з:
- [Bare Bones](https://store.mrobotics.io/Genuine-PixHawk-1-Barebones-p/mro-pixhawk1-bb-mr.htm) - Just the board (useful as a 3DR Pixhawk replacement)
- [mRo Pixhawk 2.4.6 Essential Kit](https://store.mrobotics.io/Genuine-PixHawk-Flight-Controller-p/mro-pixhawk1-minkit-mr.htm) - includes everything except for telemetry radios
- [mRo Pixhawk 2.4.6 Cool Kit! (Limited edition)](https://store.mrobotics.io/product-p/mro-pixhawk1-fullkit-mr.htm) - includes everything you need including telemetry radios
## Характеристики
### Процесор
- 32bit STM32F427 [Cortex-M4F](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32 bit STM32F103 відмовостійкий копроцесор
### Датчики
- ST Micro L3GD20H 16 bit гіроскоп
- ST Micro LSM303D 14 bit акселерометр / магнітометр
- Invensense MPU 6000 3-вісний акселерометр/гіроскоп
- MEAS MS5611 барометр
### Інтерфейси
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN (один з внутрішнім 3.3В трансивером, один на конекторі розширювача)
- Spektrum DSM / DSM2 / DSM-X® Satellite сумісний вхід
- Futaba S.BUS® сумісний вхід і вивід
- Вхід сигналу PPM sum
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3 та 6.6V ADC входи
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
### Система живлення та захист
- Ідеальний діодний контролер з автоматичним перемиканням на резервне живлення
- Сервопривід високої потужності (max. 10В) і сильного струму (10A+)
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
## Номінальна напруга
Pixhawk може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини: вхід модуля живлення, вхід сервоприводу, вхід USB.
### Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи
- Вхід модуля живлення (4.8В до 5.4В)
- Servo rail input (4.8V to 5.4V) **UP TO 10V FOR MANUAL OVERRIDE, BUT AUTOPILOT PART WILL BE UNPOWERED ABOVE 5.7V IF POWER MODULE INPUT IS NOT PRESENT**
- Вхід живлення USB (4.8В до 5.4В)
### Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- Вхід модуля живлення (4.1В до 5.7В, 0В до 20В неушкоджений)
- Вхід сервоприводу (4.1В до 5.7В, 0В до 20В)
- Вхід живлення USB (4.1В до 5.7В, 0В до 6В)
## Креслення
[FMUv2 + IOv2 schematic](https://raw.githubusercontent.com/PX4/Hardware/master/FMUv2/PX4FMUv2.4.5.pdf) -- Schematic and layout
:::info
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
## З'єднання
Порти Pixhawk показані нижче.
Вони використовують роз’єми Hirose DF13 (передують роз’ємам JST-GH, визначеним у стандарті роз’ємів Pixhawk).
:::warning
Many 3DR Pixhawk clones use Molex picoblade connectors instead of DF13 connectors.
Вони мають прямокутні штифти замість квадратних, і їх не можна вважати сумісними.
:::

:::tip
The `RC IN` port is for RC receivers only and provides sufficient power for that purpose.
**NEVER** connect any servos, power supplies or batteries to it or to the receiver connected to it.
:::
## Схема розташування виводів
#### TELEM1, TELEM2 порти
| Pin | Сигнал | Вольтаж |
| -------------------------- | ---------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
#### Порт GPS
| Pin | Сигнал | Вольтаж |
| -------------------------- | --------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CAN2 TX | +3.3V |
| 5 (blk) | CAN2 RX | +3.3V |
| 6 (blk) | GND | GND |
#### SERIAL 4/5 port
У зв'язку з обмеженням простору два порти знаходяться на одному роз'ємі.
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (#4) | +3.3V |
| 3 (blk) | RX (#4) | +3.3V |
| 4 (blk) | TX (#5) | +3.3V |
| 5 (blk) | RX (#5) | +3.3V |
| 6 (blk) | GND | GND |
#### ADC 6.6V
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | --------------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +6.6V |
| 3 (blk) | GND | GND |
#### ADC 3.3V
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | ------------------------ |
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | до +3.3V |
| 3 (blk) | GND | GND |
| 4 (blk) | ADC IN | до +3.3V |
| 5 (blk) | GND | GND |
#### I2C
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------ | ------------------------------------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
#### CAN
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------- | ------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
#### SPI
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------------------------------------------------------ | -------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | SPI_EXT_SCK | +3.3 |
| 3 (blk) | SPI_EXT_MISO | +3.3 |
| 4 (blk) | SPI_EXT_MOSI | +3.3 |
| 5 (blk) | !SPI_EXT_NSS | +3.3 |
| 6 (blk) | !GPIO_EXT | +3.3 |
| 7 (blk) | GND | GND |
#### POWER
| Pin | Сигнал | Вольтаж |
| -------------------------- | ------- | --------------------- |
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
#### SWITCH
| Pin | Сигнал | Вольтаж |
| -------------------------- | -------------------------------------------------------- | --------------------- |
| 1 (red) | VCC | +3.3V |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | SAFETY | GND |
## Налаштування послідовного порту
| UART | Пристрій | Порт |
| ------ | ---------- | --------------------------------------------- |
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | | |
| UART7 | CONSOLE | |
| UART8 | SERIAL4 | |
## Відладочні порти
### Порт Консолі
The [PX4 System Console](../debug/system_console.md) runs on the port labeled [SERIAL4/5](#serial-4-5-port).
:::tip
A convenient way to connect to the console is to use a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1), as it comes with connectors that can be used with several different Pixhawk devices.
Simply connect the 6-pos DF13 1:1 cable on the [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1) to the Pixhawk `SERIAL4/5` port.

:::
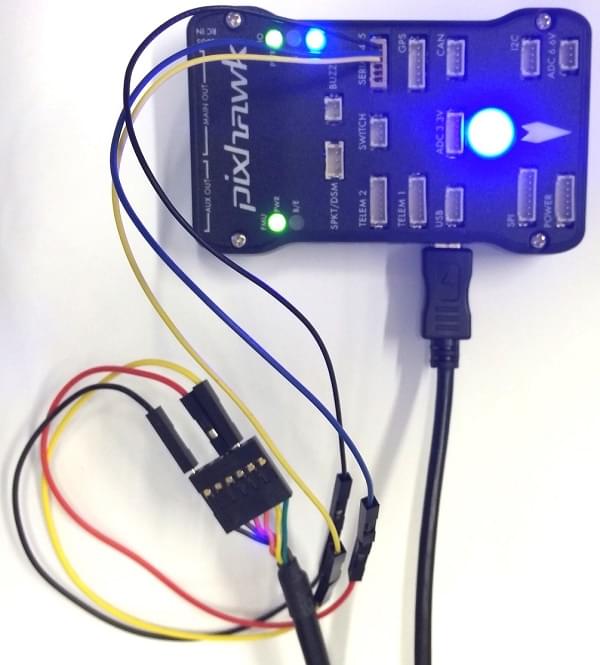
The pinout is standard serial pinout, designed to connect to a [3.3V FTDI](https://www.digikey.com/en/products/detail/TTL-232R-3V3/768-1015-ND/1836393) cable (5V tolerant).
\| 3DR Pixhawk 1 | | FTDI |
\| ------------- | --------- | ---- | ---------------- |
\| 1 | +5V (red) | | N/C |
\| 2 | S4 Tx | | N/C |
\| 3 | S4 Rx | | N/C |
\| 4 | S5 Tx | 5 | FTDI RX (yellow) |
\| 5 | S5 Rx | 4 | FTDI TX (orange) |
\| 6 | GND | 1 | FTDI GND (black) |
Підключення кабелю FTDI до 6-контактного роз’єму DF13 1:1 показано на малюнку нижче.

Повна проводка показана нижче.
:::info
For information on how to _use_ the console see: [System Console](../debug/system_console.md).
:::
### SWD Port
The [SWD](../debug/swd_debug.md) (JTAG) ports are hidden under the cover (which must be removed for hardware debugging).
Є окремі порти для FMU та IO, як показано нижче.

Порти являють собою 10-контактні роз’єми JTAG ARM, які вам, ймовірно, доведеться паяти.
Схема контактів для портів показана нижче (квадратні маркери в кутах вище вказують на контакт 1).

:::info
All Pixhawk FMUv2 boards have a similar SWD port.
:::
## Збірка прошивки
:::tip
Most users will not need to build this firmware!
It is pre-built and automatically installed by _QGroundControl_ when appropriate hardware is connected.
:::
To [build PX4](../dev_setup/building_px4.md) for this target:
```
make px4_fmu-v3_default
```
## Частини / Корпуси
- **ARM MINI JTAG (J6)**: 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF ([Digi-Key](https://www.digikey.com/en/products/detail/20021521-00010T1LF/609-4054-ND/2414951),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 ([Digikey](https://www.digikey.com/en/products/detail/harwin-inc/M50-3600542/2264370))
- JTAG Adapter Option #1: [BlackMagic Probe](https://1bitsquared.com/products/black-magic-probe). Зверніть увагу, що може поставлятися без кабелів (перевірте у виробника).
If so, you will need the **Samtec FFSD-05-D-06.00-01-N** cable ([Samtec sample service](https://www.samtec.com/products/ffsd-05-d-06.00-01-n) or [Digi-Key Link: SAM8218-ND](https://www.digikey.com/en/products/detail/samtec-inc/ffsd-05-d-06-00-01-n/1106577)) or [Tag Connect Ribbon](https://www.tag-connect.com/product/10-pin-cortex-ribbon-cable-4-length-with-50-mil-connectors) and a Mini-USB cable.
- JTAG Adapter Option #2: [Digi-Key Link: ST-LINK/V2](https://www.digikey.com/product-detail/en/stmicroelectronics/ST-LINK-V2/497-10484-ND) / [ST USER MANUAL](https://www.st.com/resource/en/user_manual/dm00026748.pdf), needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- JTAG Adapter Option #3: [Olimex ARM-TINY](https://www.olimex.com/wiki/ARM-USB-TINY) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- **USARTs**: Hirose DF13 6 pos ([Digi-Key Link: DF13A-6P-1.25H(20)](https://www.digikey.com/products/en?keywords=H3371-ND))
- Mates: Hirose DF13 6 pos housing ([Digi-Key Link: Hirose DF13-6S-1.25C](https://www.digikey.com/products/en?keywords=H2182-ND))
- **I2C and CAN**: Hirose DF13 4 pos ([Digi-Key Link: DF13A-4P-1.25H(20)](https://www.digikey.com/en/products/detail/hirose-electric-co-ltd/DF13A-4P-1-25H-20/530666) - discontinued)
## Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus.