# ModalAI Flight Core v1
:::warning
Ця модель знятий з виробництва (../flight_controller/autopilot_experimental.md) і більше комерційно не доступна.
:::
:::warning
PX4 не розробляє цей (або будь-який інший) автопілот.
Contact the [manufacturer](https://forum.modalai.com/) for hardware support or compliance issues.
:::
The ModalAI _Flight Core v1_ ([Datasheet](https://docs.modalai.com/flight-core-datasheet)) is a flight controller for PX4, made in the USA.
The Flight Core can be paired with ModalAI VOXL for obstacle avoidance and GPS-denied navigation, or used independently as a standalone flight controller.

Flight Core is identical to the PX4 Flight Controller portion of [VOXL Flight](https://www.modalai.com/voxl-flight) ([Datasheet](https://docs.modalai.com/voxl-flight-datasheet/)) which integrates the VOXL Companion Computer and Flight Core into a single PCB.
:::info
This flight controller is [manufacturer supported](../flight_controller/autopilot_manufacturer_supported.md).
:::
## Специфікація
| Характеристика | Подробиці |
| :------------------- | :--------------------------------------------------------------- |
| Вага | 6 г |
| MCU | 216MHz, 32-bit ARM M7 [STM32F765II][stm32f765ii] |
| Оперативна Пам'ять | 256Kb FRAM |
| | 2Mbit Flash |
| | 512Kbit SRAM |
| Прошивка | [PX4][px4] |
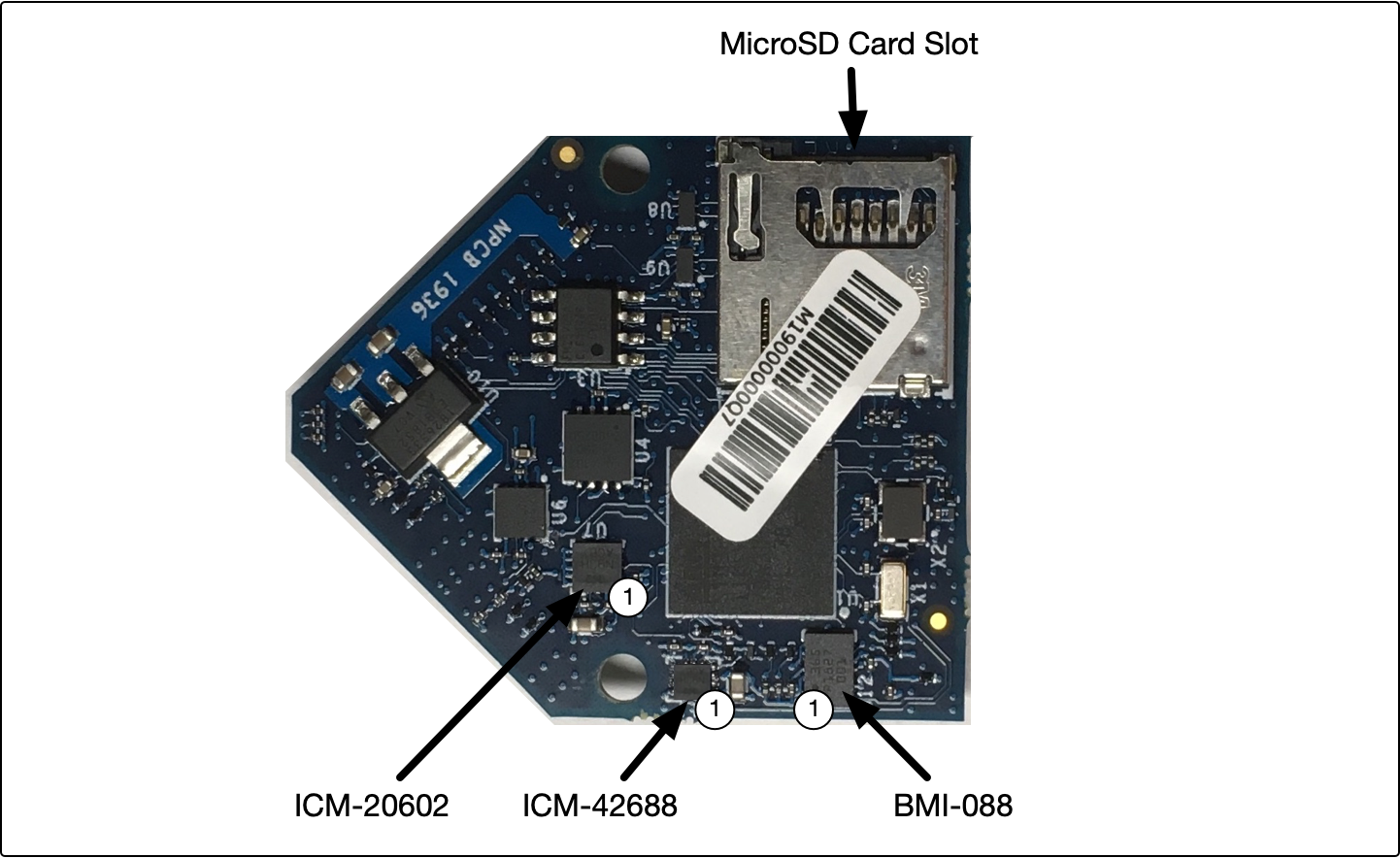
| IMUs | [ICM-20602][icm-20602] (SPI1) |
| | ICM-42688 (SPI2) |
| | [BMI088][bmi088] (SPI6) |
| Барометр | [BMP388][bmp388] (I2C4) |
| Елемент захисту | [A71CH][a71ch] (I2C4) |
| Карта microSD | [Information on supported cards](../dev_log/logging.md#sd-cards) |
| Вхідні дані | GPS/Mag |
| | Spektrum |
| | Телеметрія |
| | CAN шина |
| | PPM |
| Виводи | 6 світлодіодів (2xRGB) |
| | 8 каналів PWM |
| Додаткові Інтерфейси | 3 послідовні порти |
| | I2C |
| | GPIO |
:::info
More detailed hardware documentation can be found [here](https://docs.modalai.com/flight-core-datasheet/).
:::
[stm32f765ii]: https://www.st.com/en/microcontrollers-microprocessors/stm32f765ii.html
[bmp388]: https://www.adafruit.com/product/3966
[icm-20602]: https://invensense.tdk.com/products/motion-tracking/6-axis/icm-20602/
[bmi088]: https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi088/
[px4]: https://github.com/PX4/PX4-Autopilot/tree/main/boards/modalai/fc-v1
[a71ch]: https://www.nxp.com/products/security-and-authentication/authentication/plug-and-trust-the-fast-easy-way-to-deploy-secure-iot-connections:A71CH
## Розміри

## Сумісність прошивки PX4
_Flight Core v1_ is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a [branched PX4 version](https://github.com/modalai/px4-firmware/tree/modalai-1.11) for PX4 v1.11.
Це включає підтримку UART ESC та поліпшення в VIO та VOA, які планується включити в основний код.
More information about the firmware can be found [here](https://docs.modalai.com/flight-core-firmware/).
## QGroundControl Підтримка
Ця плата підтримується QGroundControl 4.0 та пізнішими версіями.
## Доступність
- No longer available
## Швидкий Старт
### Орієнтація
The diagram below shows the recommended orientation, which corresponds to `ROTATION_NONE` starting with PX4 v1.11.

### З’єднання
Detailed information about the pinouts can be found [here](https://docs.modalai.com/flight-core-datasheet-connectors).

| З’єднання | Опис |
| --------- | ------------------------------------------------------------------------------- |
| J1 | Роз'єм інтерфейсу зв'язку VOXL (TELEM2) |
| J2 | Програмний та відлагоджувальний роз'єм |
| J3 | USB конектор |
| J4 | UART2, UART ESC (TELEM3) |
| J5 | Конектор телеметрії (TELEM1) |
| J6 | Введенням VOXL-Power Management / розширення |
| J7 | Роз'єм виводу з 8 каналами PWM |
| J8 | Конектор шини CAN |
| J9 | PPM RC In |
| J10 | External GPS & Magnetometer Connector |
| J12 | Вхід RC, Spektrum/SBus/UART конектор |
| J13 | I2C Дисплей (роз'єм запасного датчика) / Вхід кнопки безпеки |
### Посібник користувача
The full user guide is available [here](https://docs.modalai.com/flight-core-manual/).
### Як зібрати
To [build PX4](../dev_setup/building_px4.md) for this target:
```
make modalai_fc-v1
```
## Налаштування послідовного порту
| UART | Пристрій | Порт |
| ------ | ---------- | ---------------------------------------------------- |
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | Консоль відлагодження (J2) |
| UART4 | /dev/ttyS3 | Розширення UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, Основні зв'язки VOXL (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | N/A |
## Підтримка
Please visit the [ModalAI Forum](https://forum.modalai.com/category/10/flight-core) for more information.