# ModalAI Flight Core v1
:::warning
This frame has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
:::
:::warning
PX4 does not manufacture this (or any) autopilot.
Contact the [manufacturer](https://forum.modalai.com/) for hardware support or compliance issues.
:::
The ModalAI _Flight Core v1_ ([Datasheet](https://docs.modalai.com/flight-core-datasheet)) is a flight controller for PX4, made in the USA.
The Flight Core can be paired with ModalAI VOXL for obstacle avoidance and GPS-denied navigation, or used independently as a standalone flight controller.

Flight Core is identical to the PX4 Flight Controller portion of [VOXL Flight](https://www.modalai.com/voxl-flight) ([Datasheet](https://docs.modalai.com/voxl-flight-datasheet/)) which integrates the VOXL Companion Computer and Flight Core into a single PCB.
:::info
This flight controller is [manufacturer supported](../flight_controller/autopilot_manufacturer_supported.md).
:::
## 사양
| 기능 | 세부 정보 |
| :--------- | :--------------------------------------------------------------- |
| 중량 | 6 g |
| MCU | 216MHz, 32-bit ARM M7 [STM32F765II][stm32f765ii] |
| 메모리 | 256Kb FRAM |
| | 2Mbit Flash |
| | 512Kbit SRAM |
| 펌웨어 | [PX4][px4] |
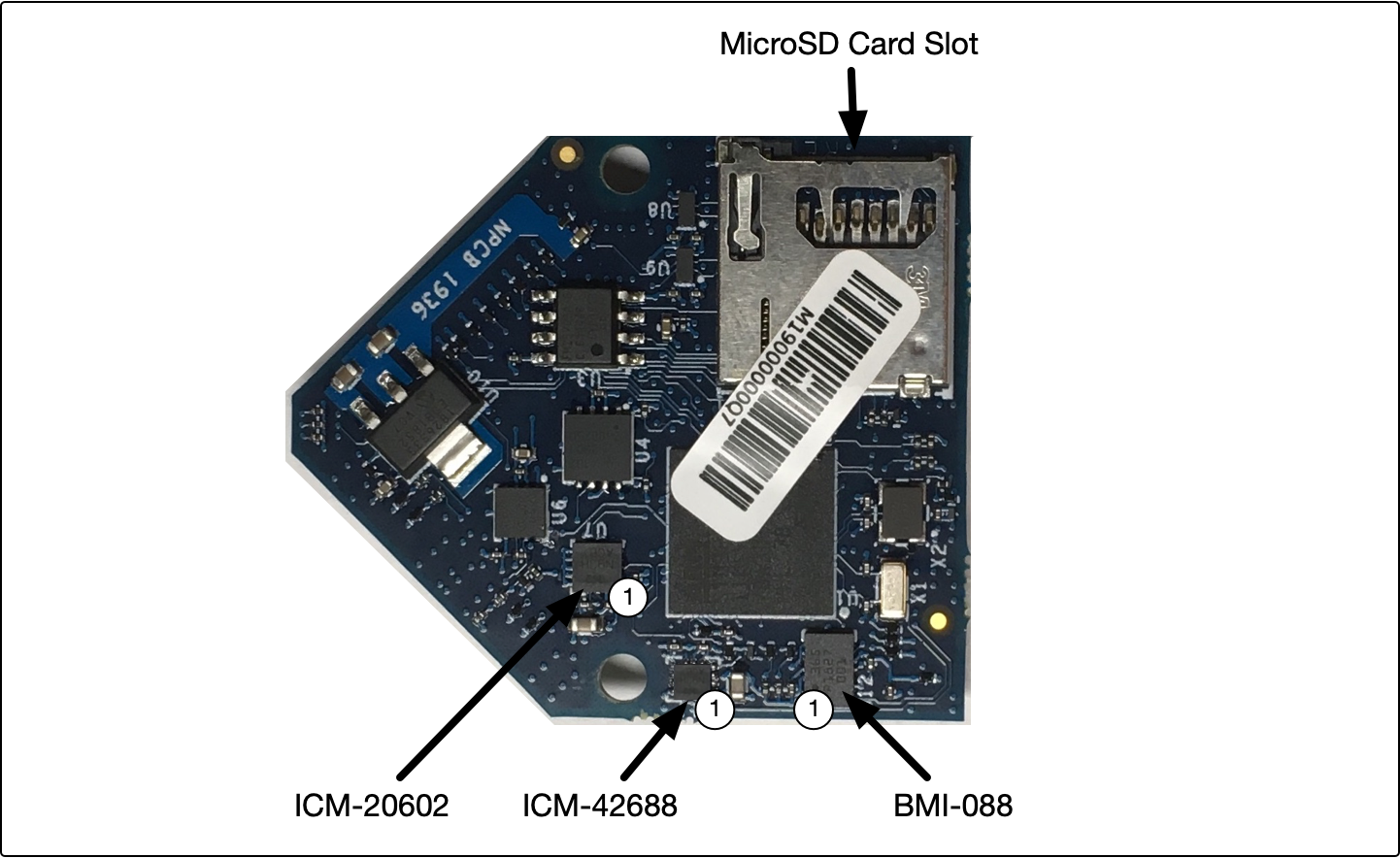
| 관성계 | [ICM-20602][icm-20602] (SPI1) |
| | ICM-42688 (SPI2) |
| | [BMI088][bmi088] (SPI6) |
| 기압계 | [BMP388][bmp388] (I2C4) |
| 보안 요소 | [A71CH][a71ch] (I2C4) |
| microSD 카드 | [Information on supported cards](../dev_log/logging.md#sd-cards) |
| 입력 | GPS/자력계 |
| | Spektrum |
| | 텔레메트리 |
| | CAN 버스 |
| | PPM |
| 출력 | LED 6 개 (2xRGB) |
| | PWM 채널 8개 |
| 추가 인터페이스 | 시리얼포트 3개 |
| | I2C |
| | GPIO |
:::info
More detailed hardware documentation can be found [here](https://docs.modalai.com/flight-core-datasheet/).
:::
[stm32f765ii]: https://www.st.com/en/microcontrollers-microprocessors/stm32f765ii.html
[bmp388]: https://www.adafruit.com/product/3966
[icm-20602]: https://invensense.tdk.com/products/motion-tracking/6-axis/icm-20602/
[bmi088]: https://www.bosch-sensortec.com/products/motion-sensors/imus/bmi088/
[px4]: https://github.com/PX4/PX4-Autopilot/tree/main/boards/modalai/fc-v1
[a71ch]: https://www.nxp.com/products/security-and-authentication/authentication/plug-and-trust-the-fast-easy-way-to-deploy-secure-iot-connections:A71CH
## 크기

## PX4 Firmware Compatibility
_Flight Core v1_ is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a [branched PX4 version](https://github.com/modalai/px4-firmware/tree/modalai-1.11) for PX4 v1.11.
This includes UART ESC support and improvements in VIO and VOA that are planned to be upstreamed.
More information about the firmware can be found [here](https://docs.modalai.com/flight-core-firmware/).
## QGroundControl 지원
아래 다이어그램은 PX4 v1.11(및 ModalAI가 유지하는 PX4 v1.10 브랜치)부터 ROTATION_NONE 권장 방향을 나타냅니다.
## 구매처
- No longer available
## 빠른 시작
### 방향
The diagram below shows the recommended orientation, which corresponds to `ROTATION_NONE` starting with PX4 v1.11.

### 커넥터
Detailed information about the pinouts can be found [here](https://docs.modalai.com/flight-core-datasheet-connectors).

| 커넥터 | 요약 |
| --- | --------------------------------------------------------- |
| J1 | VOXL 통신 인터페이스 커넥터 (TELEM2) |
| J2 | 프로그래밍 및 디버그 커넥터 |
| J3 | USB 커넥터 |
| J4 | UART2, UART ESC (TELEM3) |
| J5 | 텔레메트리 커넥터 (TELEM1) |
| J6 | VOXL - 전원 관리 입력/확장 |
| J7 | 8 채널 PWM 출력 커넥터 |
| J8 | CAN 버스 커넥터 |
| J9 | PPM RC 입력 |
| J10 | External GPS & Magnetometer Connector |
| J12 | RC 입력, Spektrum/SBus/UART 커넥터 |
| J13 | I2C 디스플레이(예비 센서 커넥터)/안전 버튼 입력 |
### 사용자 가이드
The full user guide is available [here](https://docs.modalai.com/flight-core-manual/).
### 빌드 방법
To [build PX4](../dev_setup/building_px4.md) for this target:
```
make modalai_fc-v1
```
## 시리얼 포트 매핑
| UART | 장치 | 포트 |
| ------ | ---------- | ------------------------------------------ |
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | 디버깅 콘솔(J2) |
| UART4 | /dev/ttyS3 | 확장 UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, 기본 VOXL 통신 (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | 해당없음 |
## 지원
Please visit the [ModalAI Forum](https://forum.modalai.com/category/10/flight-core) for more information.